

参考资料:https://zhuanlan.zhihu.com/p/87185139
一、3D空间中点到图像的投影
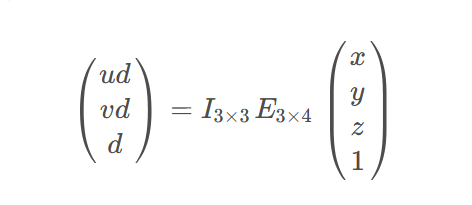
设3D空间中的点 ( x , y , z ) (x,y,z) (x,y,z)投影到图像上的像素坐标(连续值,以左上角像素的左上角为原点的坐标系,注意与整数值的图像像素索引相区别,详见此文第2部分)为 ( u , v ) ,深度为 d d d,图像内参矩阵为L3×3,外参矩阵为E3×4。则存在如下关系:
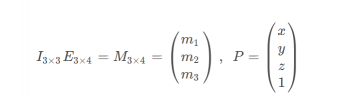
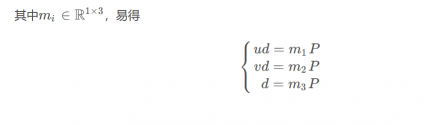
记
二、图像缩放及同一3D点在缩放前后图像中的投影坐标

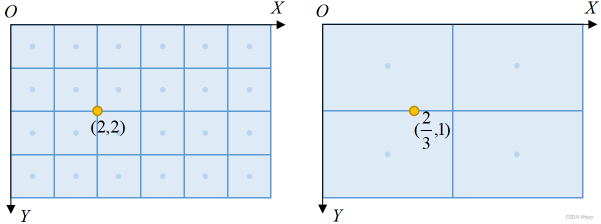
注意:设缩放前像素的整数索引为 ( u , v ),图像的宽和高分别为 W 和 H ,缩放比例(缩放因数)分别为S1和S2,若仍按照第二节的方式计算缩放后的坐标 ( u ′ , v ′ )(即 u ′ = S 1 u , v ′ = S 2 v),则存在参考资料中所谓的“0.5像素问题”。这是因为像素的整数索引和像素的连续坐标之间相差了0.5(同样可见此文第2部分)。如果在缩放时考虑到了这一点(如使用cv2.resize()函数实现缩放),则可直接使用第三节的结论。



评论(1)
您还未登录,请登录后发表或查看评论