
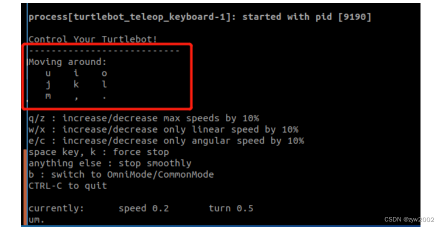
1. 键盘控制小车移动
- 分别打开两个终端,都ssh连接上小车的服务端
ssh -Y wheeltec@192.168.0.100
- 一个终端打开小车的控制节点,另一个终端打开键盘的控制节点
# 打开小车的运动控制节点
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
# 打开键盘控制的节点
roslaunch wheeltec_robot_rc keyboard_teleop.launch

- 键盘输入对应的符号,可以控制小车的移动。例如
i是向前移动,,是向后移动,u是向左上方移动等。
2. 发布话题控制小车的移动
1.小车开机,连接WIFI,密码:dongguan。
2.SSH远程登录:ssh wheeltec@192.168.0.100,密码:dongguan
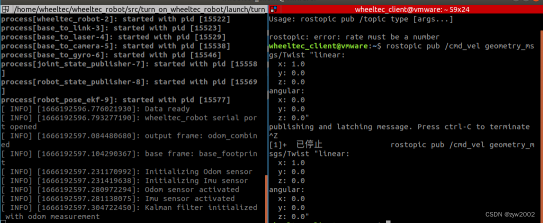
3.启动初始化节点(服务端):roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
4.发布节点(命令行)控制小车移动(客户端):rostopic pub -r 2 /cmd_vel geometry_msgs/Twist
其中-r 表示循环发布,2表示循环次数。



评论(0)
您还未登录,请登录后发表或查看评论