

课程目的
ROS开发中,最主流的编程语言应该是C++与Python了。基于C++进行可视化界面开发的话在前面课程中我们已经介绍了很多,都是基于Qt5进行实现。
那么如何使用Python进行可视化应用程序开发呢?
Python中有很多可视化GUI库,其中最主流的还是莫过于PyQt5库。
对,没听错。
在Python中也能够借助Qt5库进行开发可视化应用程序。同时借助于Python的开源包生态,基于PyQt5衍生出了很多有意思的库,在这些库的加持下可以大大加快我们的可视化软件的开发周期。
通过本次课程可以学到:
1、如何在ROS下创建PyQt5功能包
2、使用PyQt5进行ROS话题可视化的基本思路
课程内容
本次课程主要介绍基于PyQt5的ROS开发流程,课程总时长4小时。
分别给大家介绍:开发环境的搭建、针对于本次课程的PyQt5的基础使用、以及ROS PyQt5功能包的创建(ROS1与ROS2)、最后会给大家介绍在ROS1环境下去开发几个可视化应用程序的Demo。
课程试看
所需基础
1、ROS基础:对ROS机器人操作系统有基本概念
2、python基础:了解python基础语法
课程目录
1.PyQt5开发环境安装及介绍
1.1 PyQt5安装
1.2 vscode及插件安装2.PyQt5基础开发与使用
2.1 Python创建第一个可视化应用程序
2.2 PyQt5基础控件介绍及使用
2.3 信号与槽响应界面按钮事件
2.4 python调用ui文件进行界面显示
2.5 使用PyRCC调用Qt资源文件3.ROS环境下使用PyQt5
3.1 功能包的创建
3.2 话题回调与信号槽
3.3 多线程操作
3.4 话题的订阅与显示4.ROS PyQt5应用场景demo开发(基于ROS1)
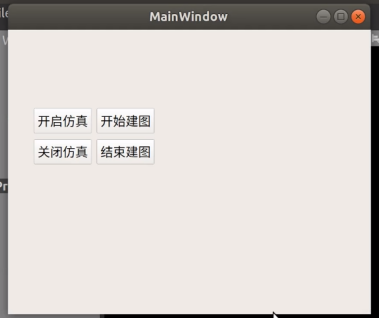
4.1 调用终端指令实现开启与关闭进程(实现开始建图/结束建图)
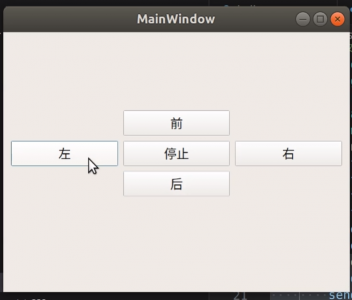
4.2 机器人速度控制功能实现
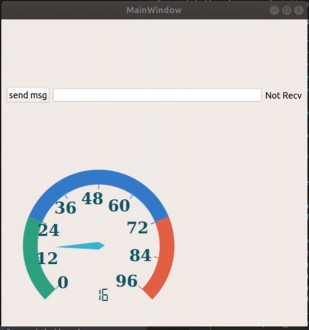
4.3 机器人速度仪表盘显示实现
*课程资料请到微信公众号“古月居”后台回复“人机交互资料”获取
温馨提示
1 、学习本课程需要具有一定的ROS与python开发基础,课程里不会介绍ROS与Python基础。将Python与ROS拆箱即用, 如果在这两方面基础不好的小伙伴建议先巩固基础再学习课程。
2、由于本产品的视频课程属性,观看后不予退款。
3、本课程购买后2年内可以免费观看。由于本产品的视频课程属性,观看后不予退款。
上新优惠
课程原价¥79.8
两人拼团¥59.8,三人拼团¥56.8
现上新价更优惠~
本周上新期间活动期间可领取一张10元优惠券
【每人限领一张,仅限本课程使用】
领取优惠券后15天内有效
_________________________________________________________________________
两种领取方式如下所示:
1.扫码领取优惠券

2.商品详情页领取





评论(0)
您还未登录,请登录后发表或查看评论