

课程目的
通过本课程的学习,一方面引导大家学习十字路口道路场景建模、信号灯相位配时方案、车流协同控制策略、路径规划和跟踪等知识,逐步掌握从方案构想到仿真验证的全流程思路和技能。
另一方面为大家提供Matlab源代码,提高Matlab/StatFlow编程技巧,并灵活运用MATLAB自动驾驶工具箱快速构建仿真场景,验证算法功能。
课程内容
十字路口交通流仿真可为车流排队论、路段行程时间、绿波带通行等研究方向提供基础交通数据,优秀的相位配时方案、合理的车流协同控制策略对十字路口的通行效率具有重要意义。
本课程共5节内容,课程总时长4小时。
第一节内容概述十字路口交通流仿真场景。
第二节内容介绍基于MATLAB建立十字路口场景,通过具体介绍MATLAB自动驾驶工具箱的设计器和库函数,帮助学员了解MATLAB提供的丰富仿真工具链,并由此建立十字路口道路场景。
第三节内容介绍信号灯相位配时策略,通过构建东西直行、东西左转、南北直行和南北左转四相位配时方案,引导学员学习信号灯配时基础知识,并掌握利用MATLAB绘制灯色的技能,如图1所示。
第四节内容介绍车流步进协同控制策略,首先根据车流运行阶段将路段划分为三种区域,在绿色区域采用StateFlow建立车辆协同跟车/换道策略,在黄色区域采用限制变道的加减速策略,在红色区域利用贝塞尔曲线规划局部路径并利用纯跟踪算法实现路径跟踪。
第5节内容将根据建立的完整程序进行代码走读,引导学员掌握MATLAB的常见编程技巧,最终仿真场景如图5所示。

图1 信号灯灯色控制

图2 基于Stateflow的自由车流跟驰/换道模型

图3 路口内基于贝塞尔曲线的局部路径规划
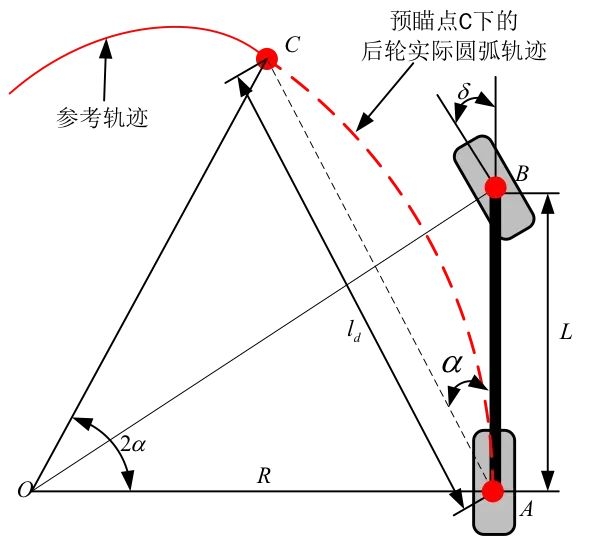
图4 纯跟踪算法示意图

图5 交通流仿真场景
其他课程
基于栅格地图的机器人路径规划算法指南 • Ally
(https://class.guyuehome.com/detail/p_6098db8ce4b071a81eb8befa/6)
课程目录
1. 十字路口交通流仿真场景概述
2. 基于MATLAB建立十字路口场景
2.1 MATLAB自动驾驶工具箱简介
2.2 十字路口场景设定
2.3 MATLAB脚本建立场景的技巧点拨
2.4 程序代码走读
3. 信号灯相位配时策略
3.1 相位配时基本原则
3.2 四相位配时方案
3.3 四相位配时方案仿真展示
4. 车流步进协同控制策略
4.1 车流步进协同控制策略的几点思考
4.2 绿色区域-自由车流步进协同控制策略
4.2.1 车流协同跟车/换道策略
4.2.2 利用stateflow建立跟车/换道策略模型
4.3 黄色区域-限制变道加减速策略
4.4 红色区域-路径规划与路径跟踪
4.4.1 基于贝塞尔曲线的路口路径规划
4.4.2 基于纯跟踪的路径跟踪
5. 完成程序走读与仿真
5.1 程序代码主体框架介绍
5.2 MATLAB完成代码走读
*课程资料在微信公众号“古月居”后台回复“仿真控制资料”获取
温馨提示
本课程购买后2年内可以免费观看。由于本产品的视频课程属性,观看后不予退款。
适用人群
1、本课程为十字路口交通流仿真入门课程,适合刚接触交通流仿真,希望进一步研究掌握排队论、绿波带、路段行程时间等研究领域的人群。
2、同时也适用于具有一定MATLAB编程基础,希望掌握更多Matlab编程技巧和Stateflow有限状态机建模的人群。
3、同时也为具有一定自由车流协同控制策略、路径规划和跟踪知识储备和丰富经验的人群了解更多应用场景提供参考。
购课优惠
古月居官网所获积分可以兑换优惠券哦!打开古月居官网-【我的主页】-【积分兑换】,点击兑换。


兑换成功后在【兑换记录】查看兑换码,就可以在手机端使用了,不要错过省钱机会哟~



购买课程
基于MATLAB的十字路口交通流仿真 • Ally(黎万洪)
其他课程
《基于栅格地图的机器人路径规划算法指南 • Ally》
也同等适用
每人限领2张优惠券
15天内可使用





↑火爆课程,限时优惠券!





评论(0)
您还未登录,请登录后发表或查看评论