

序言
拿到X3 Module已经有一段时间了,这期间我使用RDK X3 Module参与了第十一届全国大学生光电设计竞赛中的赛题二:“迷宫寻宝”光电智能小车,通过东南区赛选拔后进入国赛现场赛,并在现场赛中取得了国赛一等奖的成绩。
不得不说,X3在比赛中的表现真的是十分优秀的,高速推理yolov5不说,其作为上位机控制整个自动小车,在开发主程序时也十分舒适。
赛题介绍(简略说明)
竞赛说明
智能车通过光电传感寻找、判断迷宫中的真、假宝藏,并在完成寻宝后走出迷宫。竞赛采用红、蓝对抗的形式,即每场比赛红、蓝两队在同一迷宫中比拼、对抗。比赛胜负依据各自的寻宝数、误判数、是否走出迷宫、耗时等确定。
竞赛规则
智能车:由参赛队自备,自动驾驶小车。严禁使用遥控或其他非光电技术方式导航、搜寻和识别。智能车应具有一键式启动开关。
识图装置:小车可附带车载或分体的识图装置用于识别藏宝图。识图装置在拍摄藏宝图后,需通过一键式操作自动完成迷宫、宝物等的识别、位置校正和分析,不得人工介入。
竞赛场地
迷宫:在室内体育馆里搭建,面积约 4m×4m,如图 1 所示。迷宫地面颜色为白色,隔板只在与边界平行或垂直的方向放置。隔板之间为迷宫车道,宽约 40cm。沿车道的中线粘贴约 2cm 宽的黑色胶带作为循迹线。迷宫左下角开口处地面涂蓝色,为蓝队小车的迷宫入口,同时也是红队的迷宫出口。迷宫右上角开口地面涂红色,是红队入口,蓝队出口。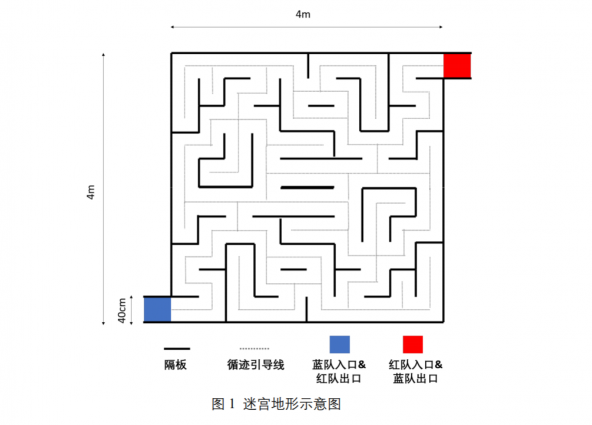
藏宝图:彩色打印在 A4 白纸上,藏宝图四角标有用于定位的方形标志点,供参赛者拍照后进行透视校正。图中的黑线代表迷宫的隔墙,循迹线不在图中标出。用黑色圆点代表宝藏或伪宝藏位置(由软件随机生成 8 个点),红色块代表红队入口和蓝队出口;蓝色块代表蓝队入口和红队出口,如图 3 所示。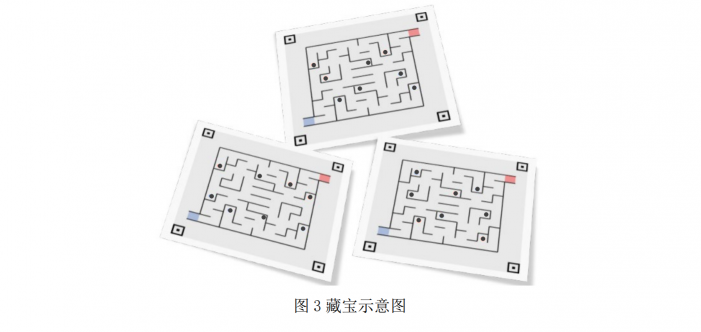
宝藏:每场比赛,双方各有 3 个与队色(蓝、红)相近的多米诺骨牌己方宝藏,另有红、蓝各 1 个骨牌牌面有贴纸的伪宝藏(如图 2 )。宝藏及伪宝藏的位置按藏宝图随机摆放、双色交错对称,并且颜色关于中心点对称。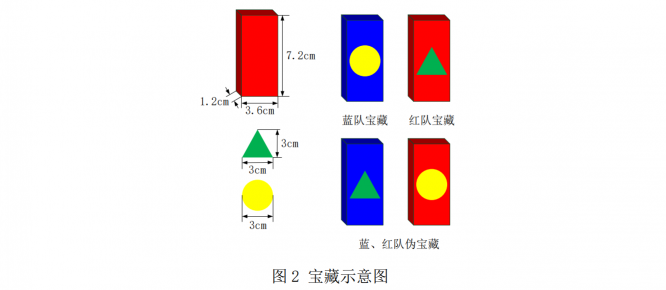
评分规则
双方有5分钟识图时间识别藏宝图,随后一键式启动小车开始寻宝。
小车以直接碰撞的方式推倒己方真宝藏,己方加分,碰倒对方宝藏或伪宝藏,对方加分,寻宝限时10分钟。
如果小车在比赛中发生了撞墙,倾覆等情况,由参数选手发出申请,裁判将小车拿回起点,重新启动小车,罚时15秒,中断次数+1。
胜负判定的优先级为:寻宝数(分数) > 耗时 > 中断次数。
以上为规则简略说明,具体细则请查询全国大学生光电设计竞赛官网。
实现思路
机械方面在尝试了几种方案后,最终决定采用2轮差速小车,该结构可以在迷宫中灵活运动,控制方便。
供电使用18650电池组(6节串联 25.2V 3000mAh)通过2组LM2596降压电源模块分别提供5V逻辑供电和12V动力供电。
下位机采用Arduino Uno + 自制PCB扩展板,该扩展板引出了电机接口(包括编码器),串口,iic接口以及供电接口等。并且搭载了陀螺仪和2路电机控制模块。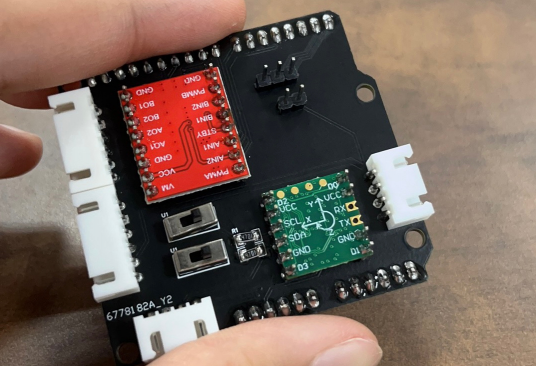
通过下位机扩展板引出的iic接口,连接了一板八路灰度传感器模块,并且通过12V供电接口外置一条LED灯带,用于视觉补光。
上位机使用RDK X3 Module以及官方载板,同样自制了PCB板,引出串口连接下位机,并且搭载指示灯和按键,作为控制台。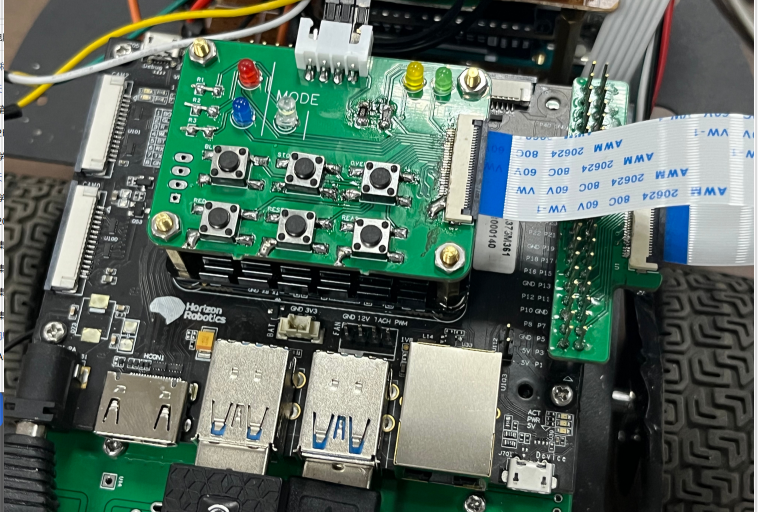
上位机主要负责主程序控制以及视觉和逻辑算法的运行,例如:基于纯OpenCV数字图像处理的藏宝图识别算法,自创路径规划算法,基于RDK X3上yolov5目标检测模型的宝藏骨牌识别算法。
下位机
由于本文主要讲解RDK X3 Module在该赛中的应用,所以下位机不讲述具体思路,只介绍上位机对下位机的串口控制方式。下位机的代码由于反复调试,结构较乱,也就不在此做展示了,感兴趣的朋友可以前往我的代码仓库查看:github.com/hachi-leaf/guangsai_national/tree/main/Uno_1.1
根据赛题的地图,下位机需要实现的运动控制主要包括: 直线循迹, 左/右转弯, 掉头, 撞击等运动方式。
调试好各个运动方式的参数后,在下位机中将其整合,使其能够接受上位机发送的路径信息并依照次路径运动,并在路径结束后发送字符反馈给上位机,以下是串口通信控制方式图解。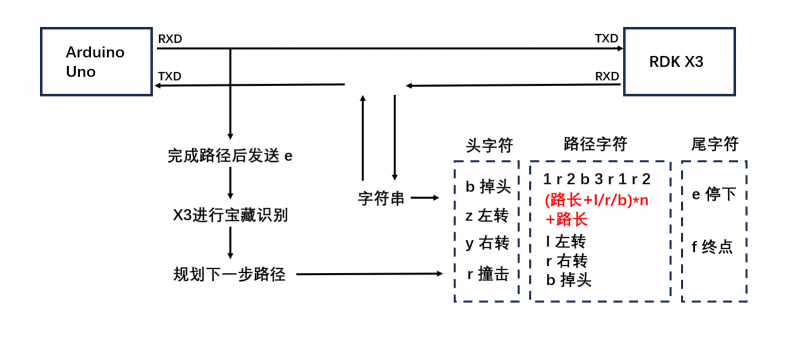
按照此思路做好下位机程序后,调试稳定,上位机便可以通过串口控制小车在整张地图中运动了,接下来就可以开始编写上位机部分程序了。
上位机
上位机的程序主要包括:藏宝图识别,路径规划,藏宝图骨牌识别,以及进程控制几个方面:
藏宝图识别
赛题的藏宝图打印图如下,打印在A4纸上。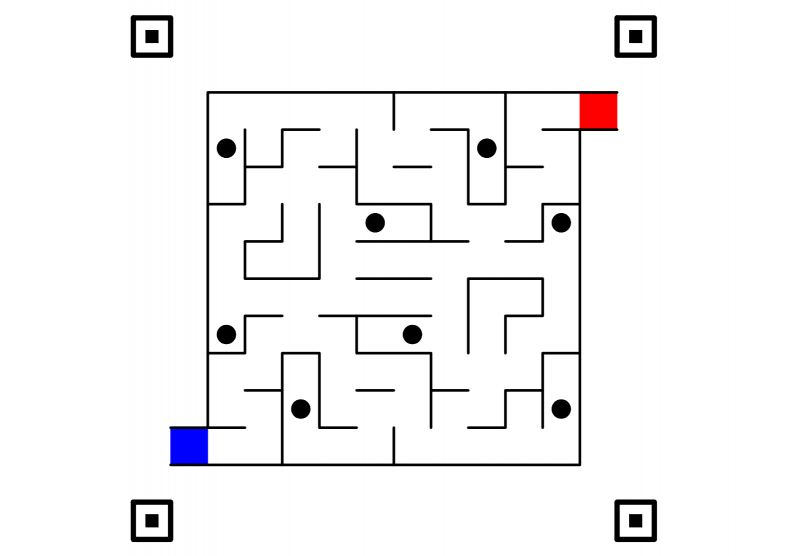
大部分人的算法思路应该都是通过四个角落的定位点来定位矫正,但是我选择了另外一种思路来处理:
首先对图片进行resize,二值化,高斯滤波操作
img = cv2.resize(img,(720,720))
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img_GaussianBlur = cv2.GaussianBlur(img_gray, (3,3), 0)

随后进行Canny边缘检测和膨胀操作
img_Canny = cv2.Canny(img_GaussianBlur,63,255)
kernel_3 = np.ones((3,3),np.uint8)
img_dil = cv2.dilate(img_Canny,kernel_3,iterations = 1)

随后使用cv2的一个库函数cv2.findContours寻找图片中的所有矩形,并筛选出位置最靠近中间的矩形,提取其角落坐标点,根据该坐标点,对原图像进行透视矫正
# Find the contours
countours, __ = cv2.findContours(img_dil, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
con_date = []
# Traverse the contours
for __ , cnt in enumerate(countours):
epsilon = 0.1 * cv2.arcLength(cnt, True) # Calculates the length of the contours line
approx = cv2.approxPolyDP(cnt, epsilon, True)
# Append the vertex coordinates and the distance from center
point_date = []
point = approx.reshape(-1,2)
point = point.tolist()
if len(point) == 4:
point_date.append(point)
ly = ( point[0][0] + point[1][0] + point[2][0] + point[3][0] )/4
lx = ( point[0][1] + point[1][1] + point[2][1] + point[3][1] )/4
lo = ((lx-359.5)**2 + (ly-359.5)**2)**(1/2)
point_date.append(lo)
con_date.append(point_date)
# Output the error1
if len(con_date) == 0:
return 1 , None
# Find the point that has the shortest distance from center
min_len = 1000
min_i = -1
for i in range(len(con_date)):
if con_date[i][1] < min_len:
min_len = con_date[i][1]
min_i = i
true_point = con_date[min_i][0]
# Calculate the central coordinate again
ty = ( true_point[0][0] + true_point[1][0] + true_point[2][0] + true_point[3][0] )/4
tx = ( true_point[0][1] + true_point[1][1] + true_point[2][1] + true_point[3][1] )/4
# Compute transformation matrix
point1 = [None,None,None,None]
for i in range(4):
if true_point[i][0] - ty < 0 and true_point[i][1] - tx < 0:
point1[0] = true_point[i]
elif true_point[i][0] - ty < 0 and true_point[i][1] - tx > 0:
point1[1] = true_point[i]
elif true_point[i][0] - ty > 0 and true_point[i][1] - tx > 0:
point1[2] = true_point[i]
elif true_point[i][0] - ty > 0 and true_point[i][1] - tx < 0:
point1[3] = true_point[i]
else:
return 2 , None # Output the error2
# Output the error5
try:
point1 = np.array(point1,dtype = "float32")
except:
return 5 , None
point2 = np.array([[0,0],[0,512],[512,512],[512,0]],dtype = "float32")
M = cv2.getPerspectiveTransform(point1,point2)
# Perspective transformation
Map_p1 = cv2.warpPerspective(img,M,(512,512))
得到如下图像
再进行灰度转化,完全矫正图像
# Grayscale conversion
Map_gray = cv2.cvtColor(Map_p1, cv2.COLOR_BGR2GRAY)
# Rotation correction
point3 = np.array([[4,4],[466,0],[508,508],[47,511]],dtype = "float32")
point4 = np.array([[16,16],[656,16],[656,656],[16,656]],dtype = "float32")
M_t = cv2.getPerspectiveTransform(point3,point4)
Map_p2 = cv2.warpPerspective(Map_gray,M_t,(672,672))
# Use Binarization to get directions
__ , Map_p3 = cv2.threshold(Map_p2, 127 , 255, cv2.THRESH_BINARY_INV)
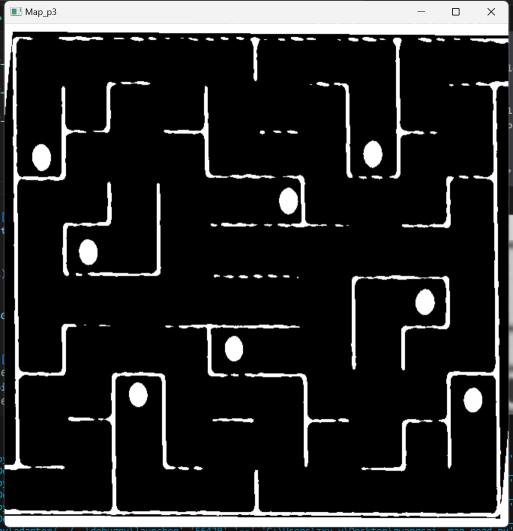
到此为止宝藏点坐标的提取就十分简单了,但我的算法中还在代码中用列表存取了地图地形,便于与矫正出的图像进行比对验证。
具体代码见:github.com/hachi-leaf/guangsai_national/tree/main/RDK_guangsai/map_read.py
效果展示见:www.bilibili.com/video/BV1FV4y167Lm
路径规划
路径规划部分,我的算法在撰写时没有参考任何文献,完全是自己的思路,以下命名为“伪粒子群算法”
首先看地图,无视入口和出口后,地图是10x10的,加上墙壁也就是21x21,可以直接用二维列表存储改地图。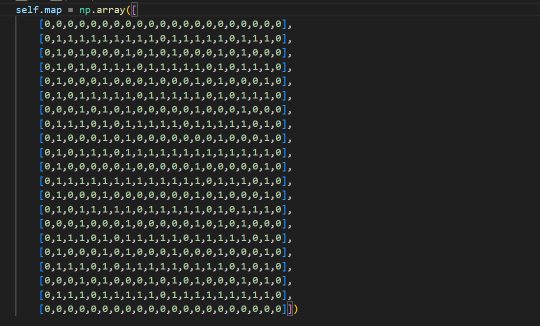
明确了这个数据结构后,我们开始做路径规划部分,路径规划主要有2个部分:
1.两点之间最短距离
2.对所有的目标点进行排序,确定遍历顺序,即全局规划
首先是两点之间最短距离,我们的路径规划思路是:在起点生成一个粒子,使其朝着四个方向(前提是没有墙阻挡)运动,遇到分叉口时,粒子将会复制,分别进入各个岔路,当有粒子的坐标等于终点坐标时,即将此粒子的路径看作最短路径,结束循环。下面开始代码实现。
首先定义类class map(),init设置基本属性(地图模型和路径信息容器)
def __init__(self):
self.map = np.array([
[0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0],
.....
[0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0]])
self.history = []
定义坐标方法
def my_loc(self,loc):
self.myloc = loc
self.map[loc[0]*2+1,loc[1]*2+1] = 2
定义宝藏点方法
def set_targets(self,targets):
for target in targets:
self.map[target[0]*2+1,target[1]*2+1] = 3
可视化打印地图方法
def map_print(self):
print("+---0---1---2---3---4---5---6---7---8---9--> y")
for i in range(21):
if i%2 == 0:
print("|",end=' ')
else:
print(int((i-1)/2),end=' ')
for j in range(21):
if self.map[i,j] == 1:
print(' ',end=' ')
if self.map[i,j] == 0:
print('#',end=' ')
if self.map[i,j] == 2:
print('*',end=' ')
if self.map[i,j] == 3:
print('@',end=' ')
print()
print('V')
print('x')
效果如下: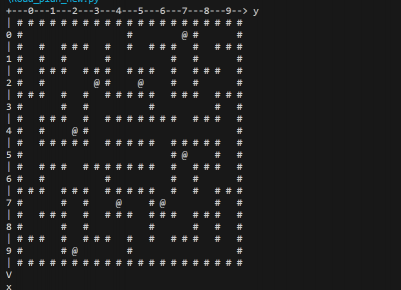
不妨在全局定义一个将地图坐标转化为数组坐标的函数,避免代码凸长。
def x(x_loc):
return x_loc*2+1
def y(y_loc):
return y_loc*2+1
继续定义possible方法,该方法可以返回当前坐标在4个方向的可动性已经是否在目标点旁边
def possible(self,vim_targets):
psb = []
if [self.myloc[0] -1, self.myloc[1]] == vim_targets and self.map[x(self.myloc[0]) -1, y(self.myloc[1])] == 1:
return True, ['w']
if [self.myloc[0] +1, self.myloc[1]] == vim_targets and self.map[x(self.myloc[0]) +1, y(self.myloc[1])] == 1:
return True, ['s']
if [self.myloc[0], self.myloc[1]+1 ] == vim_targets and self.map[x(self.myloc[0]), y(self.myloc[1]) +1] == 1:
return True, ['d']
if [self.myloc[0], self.myloc[1]-1 ] == vim_targets and self.map[x(self.myloc[0]), y(self.myloc[1]) -1] == 1:
return True, ['a']
if self.map[x(self.myloc[0]) -1, y(self.myloc[1])] == 1 and self.map[x(self.myloc[0]) -2, y(self.myloc[1])] == 1:
psb.append('w')
if self.map[x(self.myloc[0]) +1, y(self.myloc[1])] == 1 and self.map[x(self.myloc[0]) +2, y(self.myloc[1])] == 1:
psb.append('s')
if self.map[x(self.myloc[0]), y(self.myloc[1]) -1] == 1 and self.map[x(self.myloc[0]), y(self.myloc[1]) -2] == 1:
psb.append('a')
if self.map[x(self.myloc[0]), y(self.myloc[1]) +1] == 1 and self.map[x(self.myloc[0]), y(self.myloc[1]) +2] == 1:
psb.append('d')
return False , psb
以及移动方法
def move(self,dir,apd=True):
if dir == 'w':
self.map[self.myloc[0]*2+1 -2, self.myloc[1]*2+1] = 2
self.map[self.myloc[0]*2+1 -1, self.myloc[1]*2+1] = 2
self.myloc[0] -= 1
if apd:
self.history.append('w')
if dir == 's':
self.map[self.myloc[0]*2+1 +2, self.myloc[1]*2+1] = 2
self.map[self.myloc[0]*2+1 +1, self.myloc[1]*2+1] = 2
self.myloc[0] += 1
if apd:
self.history.append('s')
if dir == 'a':
self.map[self.myloc[0]*2+1, self.myloc[1]*2+1 -2] = 2
self.map[self.myloc[0]*2+1, self.myloc[1]*2+1 -1] = 2
self.myloc[1] -= 1
if apd:
self.history.append('a')
if dir == 'd':
self.map[self.myloc[0]*2+1, self.myloc[1]*2+1 +2] = 2
self.map[self.myloc[0]*2+1, self.myloc[1]*2+1 +1] = 2
self.myloc[1] += 1
if apd:
self.history.append('d')
建模完成后,开始最短路径代码实现:
定义函数接口
def shortest_road(begin_loc,end_loc,last_dir,targets,prt = False,len_mode = False):
...
return
实例化map,初始化起点和宝藏点,并将这第一个粒子放进对象列表中
first_sam = map()
first_sam.set_targets(targets)
group = [first_sam]
group[0].my_loc(cp.deepcopy(begin_loc))
在代码中要注意使用深拷贝
开始循环并遍历对象列表
flag = -1
while True:
for i in range(len(group)):
当位于开始位置时,要避免粒子穿过宝藏,必须指定一个方向让其移动,该方向就是函数接口中last_dir的反方向
if group[i].myloc == begin_loc:
print(i)
psb_flag = False
if last_dir == 'w':
psb = ['s']
if last_dir == 's':
psb = ['w']
if last_dir == 'a':
psb = ['d']
if last_dir == 'd':
psb = ['a']
else:
psb_flag , psb = group[i].possible(end_loc)
如果粒子已经到达了目标旁边,处理完这最后一次移动后就修改flag并结束循环
if psb_flag:
if psb[0] == 'w':
group[i].history.append('w')
group[i].map[x(group[i].myloc[0])-1 , y(group[i].myloc[1])] = 2
if psb[0] == 's':
group[i].history.append('s')
group[i].map[x(group[i].myloc[0])+1 , y(group[i].myloc[1])] = 2
if psb[0] == 'a':
group[i].history.append('a')
group[i].map[x(group[i].myloc[0]) , y(group[i].myloc[1])-1] = 2
if psb[0] == 'd':
group[i].history.append('d')
group[i].map[x(group[i].myloc[0]) , y(group[i].myloc[1])+1] = 2
flag = i
break
剩下的便是正常的移动处理
for j in range(len(psb)):
if len(psb)-j == 1:
group[i].move(psb[j],apd=True)
else:
new_map = cp.deepcopy(group[i])
new_map.move(psb[j],apd=True)
group.append(new_map)
处理好flag判断
if flag != -1:
break
打印接口处理
if prt:
group[flag].map_print()
到这一步,循环结束后的group[flag]就是最短路径的粒子对应的类了,我们导出其history就可以得到最短路径,但该路径是上下左右的移动信息,我们需要将其转化成便于发送给下位机的格式
road = []
road_len = 1
for i in range(len(group[flag].history)-1):
if group[flag].history[i] == group[flag].history[i+1]:
road_len += 1
if (group[flag].history[i] == 'w' and group[flag].history[i+1] == 'a') or (
group[flag].history[i] == 'a' and group[flag].history[i+1] == 's') or (
group[flag].history[i] == 's' and group[flag].history[i+1] == 'd') or (
group[flag].history[i] == 'd' and group[flag].history[i+1] == 'w'):
road.append(road_len)
road_len = 1
road.append('l')
if (group[flag].history[i+1] == 'w' and group[flag].history[i] == 'a') or (
group[flag].history[i+1] == 'a' and group[flag].history[i] == 's') or (
group[flag].history[i+1] == 's' and group[flag].history[i] == 'd') or (
group[flag].history[i+1] == 'd' and group[flag].history[i] == 'w'):
road.append(road_len)
road_len = 1
road.append('r')
road.append(road_len)
road.append('e')
另外,该函数还有road_len模式,会返回路径长度,便于全局规划,处理好该接口:
if len_mode:
road_len = 0
for date in road:
if isinstance(date,int):
road_len += date
else:
road_len += 1
return road_len - 1 , group[flag].history[-1]
函数的正常返回(标准路径格式和最后一次移动方向)
return road , group[flag].history[-1]
于是我们可以通过该函数继续两点间的最短路径计算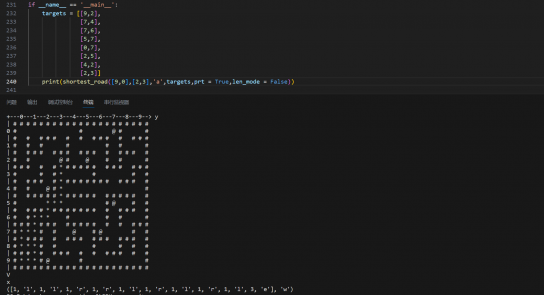
len模式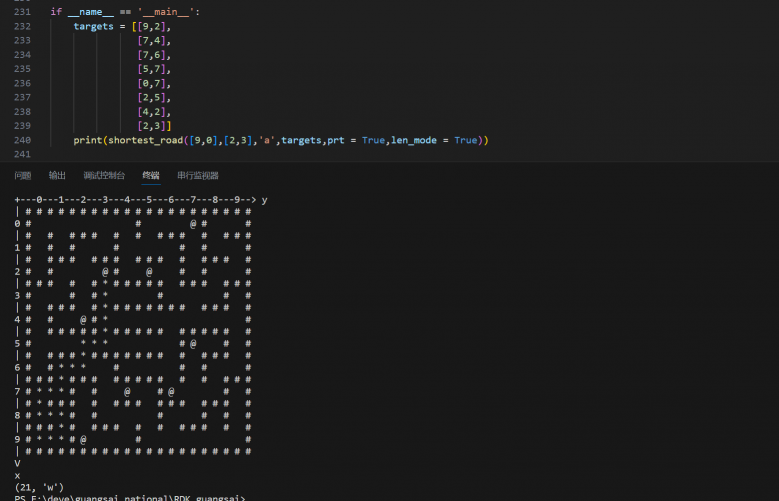
由于该地图结构较为简单,没有使用哈密顿路径等高级的全局规划算法,全局规划算法仅是遍历剩下所有目标的坐标对自己坐标的距离,选取距离最短的点,在这样简单的地图下,其实大多数结果和最优解无异。
def target_sort(targets_):
targets_new = []
targets = cp.deepcopy(targets_)
last_dir = 'a'
last_loc = [9,0]
stst_i = -1
stst_len = 9999
while len(targets) > 0:
for i in range(len(targets)):
l , dirs = shortest_road(last_loc,targets[i],last_dir,targets,prt = False,len_mode = True)
if l < stst_len:
stst_len = l
ok_dir = dirs
stst_i = i
print(last_loc)
targets_new.append(targets.pop(stst_i))
last_loc = targets_new[-1]
stst_i = -1
stst_len = -1
last_dir = ok_dir
stst_len = 9999
return targets_new
具体代码见:github.com/hachi-leaf/guangsai_national/blob/main/RDK_guangsai/Road_plan_new.py
骨牌识别
骨牌识别直接使用yolov5模型推理即可,X3的工具链上板其实并不复杂,大概分为:PC端环境部署,转化模型,板端环境部署,板端运行。
关于转化模型和板端运行方面的一些内容,大家可以参考我在地平线社区的另外一篇帖子:developer.horizon.ai/forumDetail/163807123501918330
日后我也会根据我自己的经验,再写一些关于工具链使用的教程帖
使用yolov5目标检测进行骨牌识别,一般准确率很高,但需要注意以下问题:
1.摄像头的机械安装问题,最好让目标位于摄像头正中间且角度合适
2.很多sensor会自动曝光平衡,这就导致了如果环境过亮或过暗,由于摄像头曝光平衡,目标很有可能就会在画面中显得过暗或过亮了,这时就有可能造成检测不到的结果
上位机小总结
解决完以上3个主要算法后,上位机便可以通过:识别藏宝图 —> 路径规划 —> 发送路径 —> 等待 —> 识别骨牌 —> 路径规划 ··· ··· 的进程顺序,完成赛题了。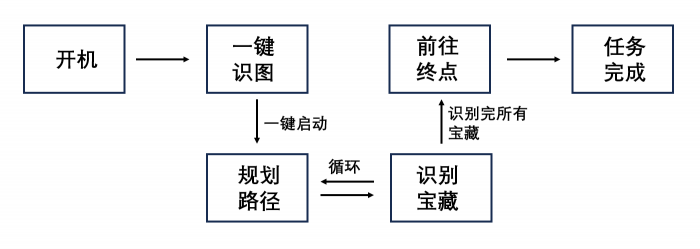
值得一提的是,比赛中需要结合按键开关一建是启动小车。并且在与对方撞击纠缠时,根据规则也需要回到起点重新出发,这些都需要按键控制,所以需要在主程序的进程控制方面做好调试。我的主程序文件:github.com/hachi-leaf/guangsai_national/tree/main/RDK_guangsai/LEV.py
同时,主程序也不能忘记设置开机自启。
总结
以上是我使用RDK X3 Module参加第11届全国大学生光电设计竞赛的技术总结。
所有的代码已开源,可以在我的仓库查看:github.com/hachi-leaf/guangsai_national
区赛效果见:www.bilibili.com/video/BV14h4y1r7GM
国赛效果见:www.bilibili.com/video/BV19P411s72J
自从我开始学习嵌入式,很快就接触到了X3这块板子,通过X3和地平线提供的平台我学到了很多东西;并且通过这次比赛,我更是硕果累累,除了赢得国家一等奖,收获的技术经验才是最珍贵的,接下来我也会不断学习电子设计,软件工程,人工智能,计算机视觉,机器人,嵌入式等方面的知识,并且会持续结合RDK X3等开发板为基础,做出更多设计作品。



评论(0)
您还未登录,请登录后发表或查看评论