

前言
上一篇介绍过使用opencv-dnn模块实现模型推理部署,但视频效果较差,本篇介绍使用onnxruntime完成模型推理部署。
一、环境
1、硬件
Intel® Core i5-7400 CPU @ 3.00GHZ
Intel® HD Graphics 630 内存4G 核显
内存 8G
win10 64位系统
2、软件
opencv4.2.0
yolov5 6.2版本
qt5.6.2
onnxruntime-win-x86-1.11.1
二、YOLO模型
我使用的是onnx模型,如果没有训练过自己的模型,可以使用官方的yolov5s.pt模型,将其转化为yolov5s.onnx模型,转化方法如下:
python export.py
在yolov5-master目录下,可以看到yolov5s.onnx模型已生成。
三、新建Qt项目
Qt项目文件结构如下: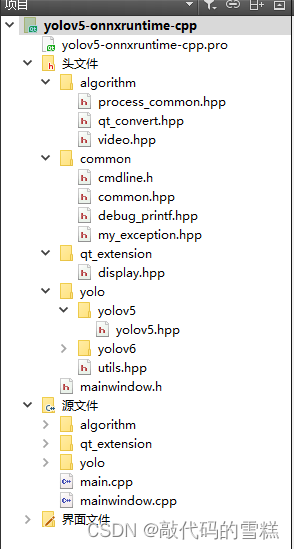
1、pro文件
在pro文件中,添加opencv相关配置,内容如下:
#-------------------------------------------------
#
# Project created by QtCreator 2022-10-17T11:16:52
#
#-------------------------------------------------
QT += core gui
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
TARGET = yolov5-onnxruntime-cpp
TEMPLATE = app
SOURCES += main.cpp\
mainwindow.cpp \
algorithm/process_common.cpp \
algorithm/qt_convert.cpp \
algorithm/video.cpp \
qt_extension/display.cpp \
yolo/utils.cpp \
yolo/yolov5/yolov5.cpp \
yolo/yolov6/yolov6.cpp
HEADERS += mainwindow.h \
algorithm/process_common.hpp \
algorithm/qt_convert.hpp \
algorithm/video.hpp \
common/cmdline.h \
common/common.hpp \
common/debug_printf.hpp \
common/my_exception.hpp \
qt_extension/display.hpp \
yolo/utils.hpp \
yolo/yolov5/yolov5.hpp \
yolo/yolov6/yolov6.hpp
FORMS += mainwindow.ui
#INCLUDEPATH += C:/opencv4.6.0/build/include
# C:/opencv4.6.0/build/include/opencv2
#LIBS += -LC:/opencv4.6.0/build/x64/vc14/lib/ -lopencv_world460
#INCLUDEPATH += C:/onnxruntime-win-x64-gpu-1.11.1/include
#LIBS += -LC:/onnxruntime-win-x64-gpu-1.11.1/lib/ -lonnxruntime
#LIBS += -LC:/onnxruntime-win-x64-gpu-1.11.1/lib/ -lonnxruntime_providers_cuda
#LIBS += -LC:/onnxruntime-win-x64-gpu-1.11.1/lib/ -lonnxruntime_providers_shared
#LIBS += -LC:/onnxruntime-win-x64-gpu-1.11.1/lib/ -lonnxruntime_providers_tensorrt
#INCLUDEPATH += C:/onnxruntime-win-x64-1.11.1/include
#LIBS += -LC:/onnxruntime-win-x64-1.11.1/lib/ -lonnxruntime
INCLUDEPATH += C:/opencv4.2.0_build/install/include
C:/opencv4.2.0_build/install/include/opencv2
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_core420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_highgui420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_imgproc420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_calib3d420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_imgcodecs420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_objdetect420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_shape420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_dnn_objdetect420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_dnn420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_video420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_videoio420
LIBS += -LC:/opencv4.2.0_build/install/x86/vc14/lib/ -lopencv_videostab420
INCLUDEPATH += C:/onnxruntime-win-x86-1.11.1/include
LIBS += -LC:/onnxruntime-win-x86-1.11.1/lib/ -lonnxruntime
2、mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QMainWindow>
#include <QMainWindow>
#include <QTimer>
#include <iostream>
#include <QFileDialog>
#include <QMessageBox>
#include <QImage>
#include "opencv2/opencv.hpp"
#include "common/my_exception.hpp"
#include "algorithm/process_common.hpp"
#include "algorithm/qt_convert.hpp"
#include "algorithm/video.hpp"
#include "qt_extension/display.hpp"
#include "yolo/yolov5/yolov5.hpp"
#include "yolo/yolov6/yolov6.hpp"
namespace Ui {
class MainWindow;
}
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
explicit MainWindow(QWidget *parent = 0);
~MainWindow();
private slots:
void on_class_names_choice_clicked();
void on_yolov5_6_choice_clicked();
void on_open_picture_clicked();
void on_open_camera_clicked();
void on_close_camera_clicked();
void read_frame();
void on_test_button_clicked();
void on_save_picture_clicked();
void on_video_choice_clicked();
void on_play_video_clicked();
void on_pause_video_clicked();
void on_end_video_clicked();
private:
Ui::MainWindow *ui;
//
QImage img;
QTimer *capture_timer = nullptr;
Video my_video;
YOLO my_yolo;
clock_t start_name = 0;
clock_t end_time = 0;
bool initialization(); // TODO 待完善
};
#endif // MAINWINDOW_H
3、mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
}
MainWindow::~MainWindow()
{
delete ui;
}
void MainWindow::on_open_picture_clicked()
{
QString curDir = QDir::currentPath(); // 获取程序的当前路径
QString filename = QFileDialog::getOpenFileName(this, "select Image", curDir,
"Images (*.png *.bmp *.jpg *.tif *.GIF )");
if (filename.isEmpty())
{
QMessageBox::warning(this, u8"警告", u8"未选中图像。");
return;
}
//TODO 暂未判空
if (!(img.load(filename))) //加载图像
{
QMessageBox::warning(this, u8"警告", u8"打开图像失败");
}
qDebug() << u8"打开图像" + filename;
img = img.convertToFormat(QImage::Format_RGB32);
if (ui->yolov5_6->isChecked())
{
std::string model_path = ui->yolov5_6_path->text().toStdString();
bool is_gpu = ui->ort_gpu->isChecked();
auto size = cv::Size(640, 640);
if (ui->size_320->isChecked())
{
size = cv::Size(320, 320);
}
my_yolo = YOLO(model_path, is_gpu, size);
float confThreshold = ui->conf->value();
float iouThreshold = ui->iou->value();
std::vector<std::string> class_names = yolo_utils::loadNames(ui->class_names_path->text().toStdString());
auto src_img = QImage_2_cvMat(img);
auto result = my_yolo.detect(src_img, confThreshold, iouThreshold); //TODO 待完善结果显示
yolo_utils::visualizeDetection(src_img, result, class_names,
ui->Box_dispaly->isChecked(), ui->class_dispaly->isChecked());
img = cvMat_2_QImage(src_img);
}
align_center(img, ui->display);
}
void MainWindow::on_open_camera_clicked()
{
try
{
my_video = Video();
my_video.open_video();
capture_timer = new QTimer(this);
connect(capture_timer, SIGNAL(timeout()), this, SLOT(read_frame())); // 时间到,读取当前摄像头信息
if (ui->yolov5_6->isChecked())
{
std::string model_path = ui->yolov5_6_path->text().toStdString();
bool is_gpu = ui->ort_gpu->isChecked();
auto size = cv::Size(640, 640);
if (ui->size_320->isChecked())
{
size = cv::Size(320, 320);
}
my_yolo = YOLO(model_path, is_gpu, size);
}
capture_timer->start(1); // 开始计时,超时则发出timeout()信号
}
catch (MyException ex)
{
QMessageBox::warning(this, u8"警告", ex.what());
}
}
void MainWindow::read_frame()
{
start_name = clock();
auto src_img = my_video.read_frame(); // 结果图转换为QImage
if (ui->yolov5_6->isChecked())
{
float confThreshold = ui->conf->value(); //TODO 需要明确含义
float iouThreshold = ui->iou->value();
std::vector<std::string> class_names = yolo_utils::loadNames(ui->class_names_path->text().toStdString());
auto result = my_yolo.detect(src_img, confThreshold, iouThreshold);
yolo_utils::visualizeDetection(src_img, result, class_names,
ui->Box_dispaly->isChecked(), ui->class_dispaly->isChecked());
}
end_time = clock();
if (ui->FPS_dispaly->isChecked())
{
auto text = "FPS: " + std::to_string(1 / ((double)(end_time - start_name) / CLOCKS_PER_SEC));
qDebug() << "Frame time: " << (double)(end_time - start_name) / CLOCKS_PER_SEC;
cv::putText(src_img, text, cv::Point(3, 25), cv::FONT_ITALIC, 0.8, cv::Scalar(0, 0, 255), 2);
}
align_center(cvMat_2_QImage(src_img), ui->display);
}
void MainWindow::on_close_camera_clicked()
{
capture_timer->stop();
delete capture_timer;
my_video.close_video();
ui->display->clear();
}
void MainWindow::on_test_button_clicked()
{
// debug_printf("print.\n");
// qDebug() << "QDEBUG";
// QMessageBox::warning(this, "警告", "除数不能为0");
// //线程释放
// quit(); // 告诉线程的事件循环以return 0(成功)退出
// wait(); // 阻塞线程,直到线程已经完成执行
// deletelater(); // 等于delete
}
void MainWindow::on_yolov5_6_choice_clicked()
{
QString curDir = QDir::currentPath(); // 获取程序的当前路径
QString filename = QFileDialog::getOpenFileName(this, "select model", curDir,
"model (*.onnx )");
if (filename.isEmpty())
{
QMessageBox::warning(this, u8"警告", u8"未选中 yolov5 model 。");
return;
}
qDebug()<< QFileInfo(filename).filePath(); // 获取文件路径
ui->yolov5_6_path->setText(QFileInfo(filename).filePath());
}
void MainWindow::on_class_names_choice_clicked()
{
QString curDir = QDir::currentPath();
QString filename = QFileDialog::getOpenFileName(this, "select class names", curDir,
"");
if (filename.isEmpty())
{
QMessageBox::warning(this, u8"警告", u8"未选中类别名称。");
return;
}
ui->class_names_path->setText(QFileInfo(filename).filePath());
}
void MainWindow::on_save_picture_clicked()
{
cv::imwrite("./save_picture.png", QImage_2_cvMat(img));
//QMessageBox::information(this, "提示", "图像保存成功。");
}
void MainWindow::on_video_choice_clicked()
{
QString curDir = QDir::currentPath();
QString filename = QFileDialog::getOpenFileName(this, "select class names", curDir,
"video (*.mp4 *.avi )");
if (filename.isEmpty())
{
QMessageBox::warning(this, u8"警告", u8"未选中视频。");
return;
}
ui->video_path->setText(QFileInfo(filename).filePath());
}
void MainWindow::on_play_video_clicked()
{
my_video = Video();
my_video.open_video(ui->video_path->text().toStdString());
if (ui->yolov5_6->isChecked())
{
std::string model_path = ui->yolov5_6_path->text().toStdString();
bool is_gpu = ui->ort_gpu->isChecked();
auto size = cv::Size(640, 640);
if (ui->size_320->isChecked())
{
size = cv::Size(320, 320);
}
my_yolo = YOLO(model_path, is_gpu, size);
}
while (1)
{
start_name = clock();
auto frame = my_video.read_frame();
if (frame.empty() || ui->end_video->isDown())
{
my_video.close_video();
ui->display->clear();
break;
}
if (ui->yolov5_6->isChecked())
{
float confThreshold = ui->conf->value();
float iouThreshold = ui->iou->value();
std::vector<std::string> class_names = yolo_utils::loadNames(ui->class_names_path->text().toStdString());
auto result = my_yolo.detect(frame, confThreshold, iouThreshold);
yolo_utils::visualizeDetection(frame, result, class_names,
ui->Box_dispaly->isChecked(), ui->class_dispaly->isChecked());
}
end_time=clock();//ms
if (ui->FPS_dispaly->isChecked())
{
auto text = "FPS: " + std::to_string(1 / ((double)(end_time - start_name) / CLOCKS_PER_SEC));
qDebug() << "Frame time(ms): " << (double)(end_time - start_name) /*/ CLOCKS_PER_SEC*/;
cv::putText(frame, text, cv::Point(3, 25), cv::FONT_ITALIC, 0.8, cv::Scalar(0, 0, 255), 2);
}
align_center(cvMat_2_QImage(frame), ui->display);
cv::waitKey(1);
}
}
void MainWindow::on_pause_video_clicked()
{
}
void MainWindow::on_end_video_clicked()
{
}
四、YOLO 类封装
1、yolov5.h
/*
* @Author: sun_liqiang
* @Date: 2022-07-01 19:32:05
* @LastEditors: sun_liqiang
* @LastEditTime: 2022-07-05 00:54:51
* @Description:
*/
#pragma once
#include <opencv2/opencv.hpp>
#include <onnxruntime_cxx_api.h>
#include <utility>
#include "../utils.hpp"
class YOLO
{
public:
YOLO();
explicit YOLO(std::nullptr_t){};
YOLO(const std::string &modelPath,
const bool &isGPU,
const cv::Size &inputSize);
std::vector<Detection> detect(cv::Mat& image, const float& confThreshold,
const float& iouThreshold);
private:
Ort::Env env{nullptr};
Ort::SessionOptions sessionOptions{nullptr};
Ort::Session session{nullptr};
void preprocessing(cv::Mat &image, float *&blob, std::vector<int64_t> &inputTensorShape);
std::vector<Detection> postprocessing(const cv::Size &resizedImageShape,
const cv::Size &originalImageShape,
std::vector<Ort::Value> &outputTensors,
const float &confThreshold, const float &iouThreshold);
static void getBestClassInfo(std::vector<float>::iterator it, const int &numClasses,
float &bestConf, int &bestClassId);
std::vector<const char *> inputNames;
std::vector<const char *> outputNames;
bool isDynamicInputShape{};
cv::Size2f inputImageShape;
};
2、yolov5.cpp
#include "yolov5.hpp"
#include <QDebug>
YOLO::YOLO()
{
}
YOLO::YOLO(const std::string &modelPath,
const bool &isGPU = true,
const cv::Size &inputSize = cv::Size(640, 640))
{
env = Ort::Env(OrtLoggingLevel::ORT_LOGGING_LEVEL_WARNING, "ONNX_DETECTION");
sessionOptions = Ort::SessionOptions();
std::vector<std::string> availableProviders = Ort::GetAvailableProviders();
qDebug()<<"availableProviders 111111111111111111111111 ="<<availableProviders.size();
for(int i = 0;i<availableProviders.size();i++)
{
//"TensorrtExecutionProvider"
//"CUDAExecutionProvider"
//"CPUExecutionProvider"
qDebug()<<"availableProviders 111111111111111111111111 ="<<QString::fromStdString(availableProviders.at(i));
}
//
auto cudaAvailable = std::find(availableProviders.begin(), availableProviders.end(), "CUDAExecutionProvider");
OrtCUDAProviderOptions cudaOption;
if (isGPU && (cudaAvailable == availableProviders.end()))
{
std::cout << "GPU is not supported by your ONNXRuntime build. Fallback to CPU." << std::endl;
std::cout << "Inference device: CPU" << std::endl;
}
else if (isGPU && (cudaAvailable != availableProviders.end()))
{
std::cout << "Inference device: GPU" << std::endl;
sessionOptions.AppendExecutionProvider_CUDA(cudaOption);
}
else
{
std::cout << "Inference device: CPU" << std::endl;
}
#ifdef __linux
session = Ort::Session(env, modelPath.c_str(), sessionOptions);
#elif _WIN32
std::wstring w_modelPath = yolo_utils::charToWstring(modelPath.c_str());
session = Ort::Session(env, w_modelPath.c_str(), sessionOptions);
#else
std::cout << "未知的平台类型!" << std::endl;
#endif
Ort::AllocatorWithDefaultOptions allocator;
Ort::TypeInfo inputTypeInfo = session.GetInputTypeInfo(0);
std::vector<int64_t> inputTensorShape = inputTypeInfo.GetTensorTypeAndShapeInfo().GetShape();
this->isDynamicInputShape = false;
// checking if width and height are dynamic
if (inputTensorShape[2] == -1 && inputTensorShape[3] == -1)
{
std::cout << "Dynamic input shape" << std::endl;
this->isDynamicInputShape = true;
}
for (auto shape : inputTensorShape)
std::cout << "Input shape: " << shape << std::endl;
inputNames.push_back(session.GetInputName(0, allocator));
outputNames.push_back(session.GetOutputName(0, allocator));
std::cout << "Input name: " << inputNames[0] << std::endl;
std::cout << "Output name: " << outputNames[0] << std::endl;
this->inputImageShape = cv::Size2f(inputSize);
}
void YOLO::getBestClassInfo(std::vector<float>::iterator it, const int &numClasses,
float &bestConf, int &bestClassId)
{
// first 5 element are box and obj confidence
bestClassId = 5;
bestConf = 0;
for (int i = 5; i < numClasses + 5; i++)
{
if (it[i] > bestConf)
{
bestConf = it[i];
bestClassId = i - 5;
}
}
}
void YOLO::preprocessing(cv::Mat &image, float *&blob, std::vector<int64_t> &inputTensorShape)
{
cv::Mat resizedImage, floatImage;
cv::cvtColor(image, resizedImage, cv::COLOR_BGR2RGB);
yolo_utils::letterbox(resizedImage, resizedImage, this->inputImageShape,
cv::Scalar(114, 114, 114), this->isDynamicInputShape,
false, true, 32);
inputTensorShape[2] = resizedImage.rows;
inputTensorShape[3] = resizedImage.cols;
resizedImage.convertTo(floatImage, CV_32FC3, 1 / 255.0);
blob = new float[floatImage.cols * floatImage.rows * floatImage.channels()];
cv::Size floatImageSize{floatImage.cols, floatImage.rows};
// hwc -> chw
std::vector<cv::Mat> chw(floatImage.channels());
for (int i = 0; i < floatImage.channels(); ++i)
{
chw[i] = cv::Mat(floatImageSize, CV_32FC1, blob + i * floatImageSize.width * floatImageSize.height);
}
cv::split(floatImage, chw);
}
std::vector<Detection> YOLO::postprocessing(const cv::Size &resizedImageShape,
const cv::Size &originalImageShape,
std::vector<Ort::Value> &outputTensors,
const float &confThreshold, const float &iouThreshold)
{
std::vector<cv::Rect> boxes;
std::vector<float> confs;
std::vector<int> classIds;
auto *rawOutput = outputTensors[0].GetTensorData<float>();
std::vector<int64_t> outputShape = outputTensors[0].GetTensorTypeAndShapeInfo().GetShape();
size_t count = outputTensors[0].GetTensorTypeAndShapeInfo().GetElementCount();
std::vector<float> output(rawOutput, rawOutput + count);
// for (const int64_t& shape : outputShape)
// std::cout << "Output Shape: " << shape << std::endl;
// first 5 elements are box[4] and obj confidence
int numClasses = (int)outputShape[2] - 5;
int elementsInBatch = (int)(outputShape[1] * outputShape[2]);
// only for batch size = 1
for (auto it = output.begin(); it != output.begin() + elementsInBatch; it += outputShape[2])
{
float clsConf = it[4];
if (clsConf > confThreshold)
{
int centerX = (int)(it[0]);
int centerY = (int)(it[1]);
int width = (int)(it[2]);
int height = (int)(it[3]);
int left = centerX - width / 2;
int top = centerY - height / 2;
float objConf;
int classId;
this->getBestClassInfo(it, numClasses, objConf, classId);
float confidence = clsConf * objConf;
boxes.emplace_back(left, top, width, height);
confs.emplace_back(confidence);
classIds.emplace_back(classId);
}
}
std::vector<int> indices;
cv::dnn::NMSBoxes(boxes, confs, confThreshold, iouThreshold, indices);
// std::cout << "amount of NMS indices: " << indices.size() << std::endl;
std::vector<Detection> detections;
for (int idx : indices)
{
Detection det;
det.box = cv::Rect(boxes[idx]);
yolo_utils::scaleCoords(resizedImageShape, det.box, originalImageShape);
det.conf = confs[idx];
det.classId = classIds[idx];
detections.emplace_back(det);
}
return detections;
}
std::vector<Detection> YOLO::detect(cv::Mat& image, const float& confThreshold,
const float& iouThreshold)
{
float *blob = nullptr;
std::vector<int64_t> inputTensorShape{1, 3, -1, -1};
this->preprocessing(image, blob, inputTensorShape);
size_t inputTensorSize = yolo_utils::vectorProduct(inputTensorShape);
std::vector<float> inputTensorValues(blob, blob + inputTensorSize);
std::vector<Ort::Value> inputTensors;
Ort::MemoryInfo memoryInfo = Ort::MemoryInfo::CreateCpu(
OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault);
inputTensors.push_back(Ort::Value::CreateTensor<float>(
memoryInfo, inputTensorValues.data(), inputTensorSize,
inputTensorShape.data(), inputTensorShape.size()));
std::vector<Ort::Value> outputTensors = this->session.Run(Ort::RunOptions{nullptr},
inputNames.data(),
inputTensors.data(),
1,
outputNames.data(),
1);
cv::Size resizedShape = cv::Size((int)inputTensorShape[3], (int)inputTensorShape[2]);
std::vector<Detection> result = this->postprocessing(resizedShape,
image.size(),
outputTensors,
confThreshold, iouThreshold);
delete[] blob;
return result;
}
3、class.names
官方yolov5s.pt模型,能够识别80种物体,classes.names文件记录的就是这80种物体类别名,如下:
person
bicycle
car
motorcycle
airplane
bus
train
truck
boat
traffic light
fire hydrant
stop sign
parking meter
bench
bird
cat
dog
horse
sheep
cow
elephant
bear
zebra
giraffe
backpack
umbrella
handbag
tie
suitcase
frisbee
skis
snowboard
sports ball
kite
baseball bat
baseball glove
skateboard
surfboard
tennis racket
bottle
wine glass
cup
fork
knife
spoon
bowl
banana
apple
sandwich
orange
broccoli
carrot
hot dog
pizza
donut
cake
chair
couch
potted plant
bed
dining table
toilet
tv
laptop
mouse
remote
keyboard
cell phone
microwave
oven
toaster
sink
refrigerator
book
clock
vase
scissors
teddy bear
hair drier
toothbrush
五、效果
以本地视频文件1.mp4为例,效果如下: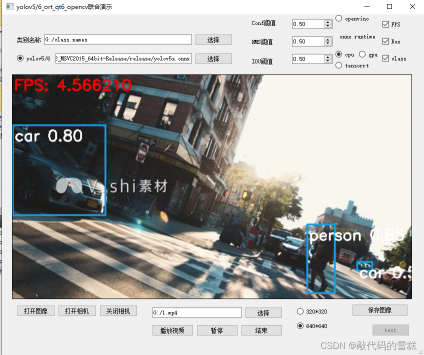
可以看到,在我的机器上,编译32位的程序后,视频卡顿现象非常严重,与opencv-dnn模块的推理部署效果差不多。
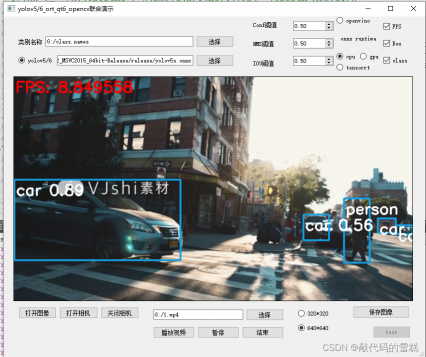
在我尝试编译64位的程序后,效果得到明显改善,FPS约为上面的两倍,效果如下:



评论(0)
您还未登录,请登录后发表或查看评论