

1.简介
前两节介绍的车辆模型 未能考虑车辆的操纵稳定性,或者说只能体现车辆横摆稳定性
鉴于无人驾驶车辆的操纵稳定性需要综合考虑车辆的 横摆稳定性 和 侧倾稳定性
因此建立 横摆、侧滑和侧倾综合等效约束 的车辆动力学模型十分重要
2.模型受力分析
考虑车辆的侧倾运动,建立横摆、侧滑和侧倾综合等效约束的车辆动力学模型受力分析如图: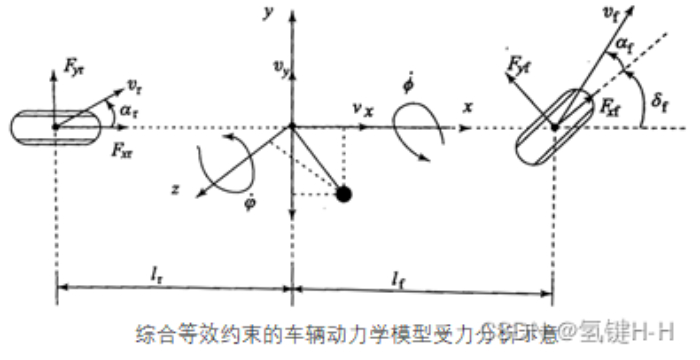
根据牛顿第二定律,分别得到车辆沿 y轴的受力平衡方程以及车辆绕 z轴和 x轴的转动力矩平衡方程:



其中FX=Fxfcos(δf)−Fyfsin(δf)+Fxr−Fdissp ,为轮胎受到的横、纵向力在车体坐标系X轴上的合力,FY=Fxfsin(δf)+Fyfcos(δf)+Fyr,为轮胎受到的横、纵向力在车体坐标系Y轴上的合力,ΔIyz=Iy−Iz 为交叉转动惯量
此时,车体的侧倾角主要是由于车辆悬架系统变形所产生的将车辆的悬架系统简化为一个弹簧-阻尼模型,则Mx=Kϕϕ+Dϕϕ',为悬架系统产生的侧倾阻力矩Kϕ和Dϕ分别表示车辆的侧倾刚度系数和侧倾阻尼系数
3. 简化
主要关注车辆的横摆运动与翻滚运动,因此对于车辆的俯仰运动,令θ≈0,θ'≈0,则 式(32)~式(34) 可以简化为:


对车辆前轮偏角δf和侧倾角ϕ等参数做小角度假设,忽略Fx对车辆横摆特性的影响,并且假设ϕ'2≈0,φ'2≈0,ΔIyz≈0,
则式(35) ~式(37)可简化为: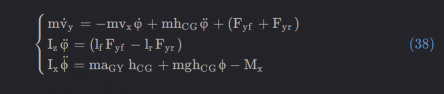
其中FYcos(ϕ)=maGy,aGy=v'y+φ'vx−hCGϕ'2为车辆质心处的横向加速度
式(38)即为横摆、侧滑和侧倾综合等效约束的车辆动力学微分方程



评论(0)
您还未登录,请登录后发表或查看评论