

1. 简介
车辆整车动力学模型一般包括用于分析:
- 车辆 平顺性 的 质量-弹簧-阻尼模型
- 车辆 操纵稳定性 的 车辆-轮胎模型
两者研究的侧重点不同
平顺性分析的重点是车辆的悬架特性
而车辆操纵稳定性分析的重点是车辆纵向及侧向动力学特性
主要研究目标是使 车辆快速而稳定地跟踪期望路径,属于车辆操纵稳定性问题
因此对于悬架特性不做深人探究
2. 假设条件
这里所建立的动力学模型主要是作为模型预测控制器中的预测模型使用
需要在较为准确地描述车辆动力学过程的基础上尽可能进行简化,以减少控制算法的计算量
因此在进行车辆动力学建模时,进行以下理想化的假设:
\quad 1. 假设无人驾驶车辆在平坦路面上行驶,忽略车辆垂向运动
\quad 2. 悬架系统及车辆是刚性的,忽略悬架运动及其对耦合关系的影响
\quad 3. 只考虑 纯侧偏 轮胎特性,忽略轮胎力的纵横向耦合关系
\quad 4. 用 单轨模型 来描述车辆运动,不考虑载荷的左右转移
\quad 5. 假设车辆行驶速度变化缓慢,忽略前后轴的载荷转移
\quad 6. 忽略纵向和横向空气动力学
3. 单轨模型
基于上述假设可以得到单轨模型,利用其来分析车辆横摆动力学模型,如图:

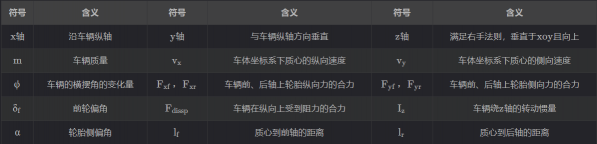
对车辆进行受力分析,根据其受力平衡和力矩平衡可以得到:
- 在x轴方向上:
m(\dot{v}_x-v_y\dot{\varphi})=F_{xf}\cos(\delta_f)-F_{yf}\sin(\delta_f)+F_{xr}-F_{dissp}
- 在y轴方向上:
m( v ˙ y +v x φ ˙ )=F xf sin(δ f )+F yf cos(δ f )+F yr
- 绕z轴方向上:
I z φ ¨ =l f [F xf sin(δ f )+F yf cos(δ f )]−l r F yr
若忽略前轮驱动力F_{xf}对车辆横摆运动的影响,即 F_{xf} \sin(\delta_f) \approx 0,上三式可写为:

其中 F_x=F_{xf}\cos(\delta_f)-F_{yf}\sin(\delta_f)+F_{xr}-F_{dissp},为轮胎受到的横、纵向力在车体坐标系x轴上的合力
当以前轮驱动的车辆作为研究目标时,认为后轮驱动力 F_{xr} = 0
轮胎受到车体坐标系x轴上的合力
当纵向速度v_x恒定,即\dot{v}_x \approx 0,则根据公式14
得到2自由度的车辆横摆动力学微分方程:
谢谢



评论(0)
您还未登录,请登录后发表或查看评论