

观前提醒:本期内容为ESP32的FreeRTOS、ESP32多核任务编程。
项目预告:一个无需计算机板卡,可以多机互动的,百元左右的物联ROS底盘车
ESP32多线程编程深入解析
在物联网(IoT)的项目中,多任务处理是一个常见的需求。ESP32,作为一款性能强大的微控制器,它内置了双核处理器以及支持多线程的FreeRTOS操作系统,使得同时处理多个任务成为可能。本文将从浅入深地解析ESP32的多线程编程方法和其特点。
一、ESP32S3多核功能简介
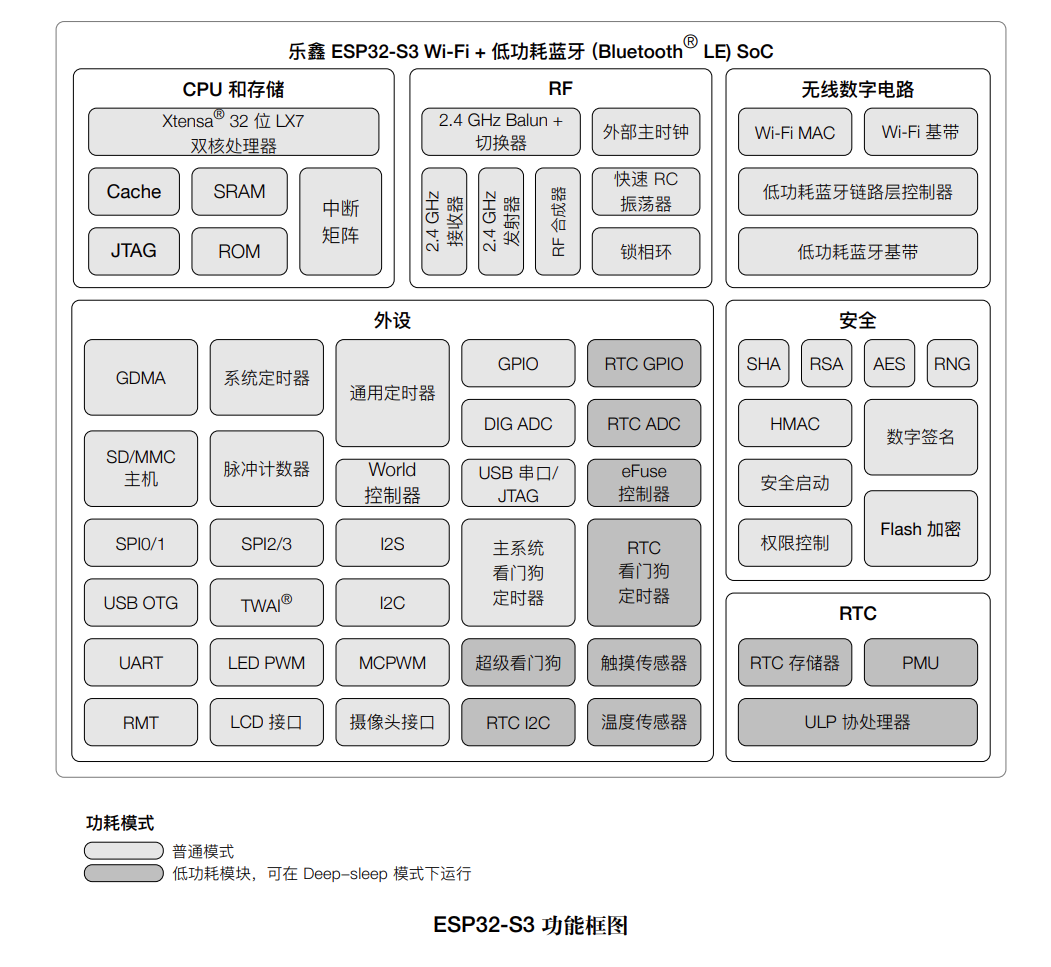
ESP32-S3 是 Espressif Systems 开发的一款低功耗微控制器,它是 ESP32 系列的一部分,专为通用低功耗设备、物联网 (IoT) 应用和智能家居等领域设计。
ESP32-S3 采用了双核 Xtensa® 32-bit LX7 微处理器,这意味着它有两个处理核心可以同时运行任务,提高了处理能力和多任务处理的效率。这两个核心可以独立运行,也可以协同工作,处理复杂的计算任务或多个并发操作。
在使用 ESP32-S3 进行编程时,可以指定特定的任务运行在哪个核心上。这可以通过使用 FreeRTOS(实时操作系统)来实现,FreeRTOS 是 ESP32-S3 常用的操作系统。
二、FreeRTOS简介
FreeRTOS是一个迷你的实时操作系统内核,为多任务处理提供了丰富的API。在ESP32上,FreeRTOS已经被高度集成和优化,可以充分利用ESP32的双核处理器。FreeRTOS的主要特点包括:
- 任务管理:可以创建、删除、挂起和恢复多个任务。
- 同步原语:包括互斥量、信号量、事件标志等,用于任务间的同步。
- 内存管理:提供动态内存分配和释放。
- 定时器:提供软件定时器,用于定时任务的执行。
简要介绍一下FreeRTOS在ESP32上的底层实现:
FreeRTOS在ESP32上的底层实现涉及到硬件抽象、中断管理、多核调度等方面
- 硬件抽象层(HAL)
FreeRTOS为不同的硬件平台提供了硬件抽象层,这样FreeRTOS的核心代码可以在不同的硬件上运行而无需修改。在ESP32上,HAL包括对CPU、定时器、中断控制器等硬件资源的抽象。这些抽象使得FreeRTOS能够利用ESP32的硬件特性,如定时器用于调度器的时基,中断控制器用于管理中断。
- 中断管理
ESP32的中断管理是通过它的中断控制器来实现的。FreeRTOS定义了一套中断服务例程(ISR)的编写规则,这些规则确保了ISR可以安全地与FreeRTOS的任务和内核对象交互。例如,FreeRTOS提供了portENTER_CRITICAL和portEXIT_CRITICAL宏来在ISR中保护临界区,防止任务切换时数据不一致。
- 多核调度
ESP32的FreeRTOS利用了双核心的特性来实现多核调度。FreeRTOS的调度器被设计为可以在多核环境下运行,每个核可以运行自己的任务。FreeRTOS在ESP32上的实现使用了特殊的同步机制,如“spinlock”锁,来同步两个核上的任务状态。
- 任务切换和上下文保存
任务切换是多任务操作系统的核心,它允许CPU在不同的任务之间切换执行。在ESP32上,FreeRTOS的任务切换涉及到保存和恢复任务的上下文,包括CPU寄存器等状态信息。FreeRTOS使用汇编语言编写的上下文切换函数portSAVE_CONTEXT和portRESTORE_CONTEXT来处理这些操作,确保任务切换时能够正确保存和恢复每个任务的状态。
三、ESP32多线程编程基础
基础多线程例程:
#include <Arduino.h>
// 定义任务句柄
TaskHandle_t Task1;
TaskHandle_t Task2;
// 定义任务函数
void Task1code( void * pvParameters ){
Serial.print("Task1 running on core ");
Serial.println(xPortGetCoreID());
for(;;){
Serial.println("This is Task1");
vTaskDelay(1000 / portTICK_PERIOD_MS); // 延迟1秒
}
}
void Task2code( void * pvParameters ){
Serial.print("Task2 running on core ");
Serial.println(xPortGetCoreID());
for(;;){
Serial.println("This is Task2");
vTaskDelay(2000 / portTICK_PERIOD_MS); // 延迟2秒
}
}
void setup() {
Serial.begin(115200);
// 创建任务
xTaskCreatePinnedToCore(
Task1code, /* 任务函数 */
"Task1", /* 任务名字 */
10000, /* 栈大小 */
NULL, /* 传递给任务函数的参数 */
1, /* 优先级 */
&Task1, /* 任务句柄 */
0); /* 核心编号 */
xTaskCreatePinnedToCore(
Task2code,
"Task2",
10000,
NULL,
1,
&Task2,
1);
}
void loop() {
// 在这里不需要做任何事情,因为所有的工作都在任务中完成
}在这个例程中,我们创建了两个任务(Task1和Task2)。每个任务都在不同的核心上运行(ESP32S3有两个核心)。每个任务都会打印一条消息,然后延迟一段时间。Task1每秒打印一次消息,而Task2每两秒打印一次消息。

可以看到Task1运行在core 0,Task2运行在core 1
简单分析一下以上的程序,我们可以看到,实现多线程的主要函数只有两个:
Task1code与xTaskCreatePinnedToCore
Task1code函数:
Task1code是任务函数,用于在FreeRTOS任务中执行。在这个例程中,它被用作任务1的主体。下面是对这个函数的详细分析:
void Task1code( void * pvParameters ){
Serial.print("Task1 running on core ");
Serial.println(xPortGetCoreID());
for(;;){
Serial.println("This is Task1");
vTaskDelay(1000 / portTICK_PERIOD_MS); // 延迟1秒
}
}- 函数定义:void Task1code( void * pvParameters )。这个函数没有返回值(void),并接受一个void *类型的参数。这个参数可以用来传递任何类型的数据给任务,但在这个例程中我们并没有使用它。
- 打印任务信息:Serial.print("Task1 running on core "); 和 Serial.println(xPortGetCoreID());。这两行代码打印出一条消息,说明任务1正在哪个核心上运行。xPortGetCoreID()函数返回当前任务正在运行的核心编号。
- 无限循环:for(;;){...}。这是一个无限循环,任务会在这个循环中一直运行,直到被删除或者ESP32S3重启。
- 打印任务消息:Serial.println("This is Task1");。这行代码在每次循环中打印一条消息,说明这是任务1。
- 延迟:vTaskDelay(1000 / portTICK_PERIOD_MS);。这行代码使任务延迟1秒(1000毫秒)。portTICK_PERIOD_MS是FreeRTOS中的一个常量,表示一个时钟滴答的毫秒数。vTaskDelay()函数使任务进入阻塞状态,直到指定的时钟滴答数过去。在这个例程中,我们使用vTaskDelay()函数来控制任务的执行频率。
xTaskCreatePinnedToCore函数:
xTaskCreatePinnedToCore是FreeRTOS库中的一个函数,用于在指定的核心上创建一个新的任务。在ESP32S3这样的多核处理器上,这个函数非常有用,它允许你控制每个任务在哪个核心上运行。
BaseType_t xTaskCreatePinnedToCore(
TaskFunction_t pvTaskCode,
const char * const pcName,
const uint32_t usStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask,
const BaseType_t xCoreID
);- pvTaskCode:这是一个指向任务函数的指针。任务函数是任务的主体,它包含了任务需要执行的代码。
- pcName:这是任务的名字,是一个以null结尾的字符串。任务的名字主要用于调试。
- usStackDepth:这是任务栈的大小,以字为单位。任务栈用于存储局部变量和函数调用的返回地址。如果任务栈太小,可能会导致栈溢出;如果任务栈太大,可能会浪费内存。
- pvParameters:这是一个指针,用于传递参数给任务函数。这个参数可以是任何类型的数据,但在任务函数中,它总是被视为void *类型。
- uxPriority:这是任务的优先级。在FreeRTOS中,数字越大,优先级越高。当多个任务都处于就绪状态时,优先级最高的任务会被优先执行。
- pxCreatedTask:这是一个指向任务句柄的指针。任务句柄是一个用于引用任务的“句柄”。你可以使用任务句柄来控制任务,例如删除任务或更改任务的优先级。
- xCoreID:这是任务应该运行的核心的编号。在ESP32S3上,这个编号可以是0或1,分别代表两个核心。如果你想让FreeRTOS自动选择一个核心,可以将这个参数设置为tskNO_AFFINITY。
任务调度
在ESP32上,FreeRTOS支持抢升式调度和时间片调度。抢升式调度意味着任何时候只要有更高优先级的任务就绪,它就会立即抢占当前正在运行的任务。而时间片调度则允许具有相同优先级的任务公平地共享CPU时间。
同步机制
在多任务环境中,任务同步是另一个重要问题。ESP32中的FreeRTOS提供了多种任务同步机制,包括信号量、互斥量和事件组等。
- 信号量(Semaphore):信号量是一种用于保护共享资源的同步机制。当一个任务需要访问共享资源时,它必须首先获得信号量。如果信号量已经被其他任务占用,那么这个任务就会被阻塞,直到信号量可用。
- 互斥量(Mutex):互斥量是一种特殊的信号量,主要用于保护共享资源,防止同时访问。与信号量不同,互斥量有所有权的概念,只有占有互斥量的任务才能释放互斥量。
- 事件组(Event Group):事件组是一种用于同步多个任务的机制。每个事件组包含一组事件位,任务可以等待一个或多个事件位被设置。当事件位被设置时,等待这些事件位的任务就会被唤醒。
四、ESP32多线程编程进阶
核心亲和性
ESP32是一款双核微控制器,这意味着它有两个CPU核心可以并行处理任务。然而,并不是所有的任务都适合在任何核心上运行。有些任务可能需要频繁地访问某些特定的硬件资源,而这些资源可能只能由特定的核心访问。这就引入了一个概念,叫做核心亲和性(Core Affinity)。
核心亲和性是指任务对运行在特定CPU核心上的偏好。在FreeRTOS中,你可以使用xTaskCreatePinnedToCore()函数来设置任务的核心亲和性。例如,以下的代码创建了一个任务,并将其固定在0号核心上运行:
void taskCode(void * parameter) {
for (;;) {
// 任务代码
}
}
void setup() {
xTaskCreatePinnedToCore(
taskCode, // 任务函数
"TaskName", // 任务名字
10000, // 栈大小
NULL, // 传递给任务函数的参数
1, // 优先级
NULL, // 任务句柄
0 // CPU核心
);
}在这个例子中,任务taskCode将始终在0号CPU核心上运行,无论1号CPU核心是否空闲。这可以确保taskCode始终有足够的CPU时间来执行,而不会被其他在1号CPU核心上运行的任务干扰。
任务队列
在多任务环境中,任务通常需要通过某种方式来交换数据。FreeRTOS提供了一种叫做任务队列(Task Queue)的机制来实现这一点。
任务队列是一种先入先出(FIFO)的数据结构,任务可以将数据项发送到队列,也可以从队列接收数据项。当队列为空时,试图从队列接收数据的任务将被阻塞,直到有其他任务发送数据到队列。同样,当队列已满时,试图向队列发送数据的任务也将被阻塞,直到有其他任务从队列接收数据。
以下是一个使用任务队列的例子:
QueueHandle_t queue;
void senderTask(void * parameter) {
int item = 0;
for (;;) {
xQueueSend(queue, &item, portMAX_DELAY);
item++;
}
}
void receiverTask(void * parameter) {
int item;
for (;;) {
xQueueReceive(queue, &item, portMAX_DELAY);
Serial.println(item);
}
}
void setup() {
queue = xQueueCreate(10, sizeof(int));
xTaskCreate(senderTask, "Sender", 10000, NULL, 1, NULL);
xTaskCreate(receiverTask, "Receiver", 10000, NULL, 1, NULL);
}在这个例子中,我们创建了一个队列和两个任务。senderTask任务不断地向队列发送数据,而receiverTask任务则不断地从队列接收数据。当队列为空时,receiverTask任务将被阻塞,直到senderTask任务发送数据到队列。当队列已满时,senderTask任务将被阻塞,直到receiverTask任务从队列接收数据。
总的来说,任务队列是一种强大的工具,它可以帮助你在任务之间传递数据,同步任务的执行,以及管理共享资源。通过合理地使用任务队列,你可以构建出复杂的多任务应用。
任务通知
任务通知是一种轻量级、高效的通信机制,它可以用来唤醒一个或多个任务。每个任务都有一个关联的通知值,任务可以等待其通知值被设置,也可以修改其通知值。
任务通知的一个常见用途是在中断服务例程(ISR)中唤醒一个任务。例如,当一个外部中断触发时,ISR可以通过设置任务的通知值来唤醒该任务,然后该任务可以处理中断事件。
以下是一个使用任务通知的例子:
void taskCode(void * parameter) {
uint32_t notificationValue;
for (;;) {
xTaskNotifyWait(0, 0, ¬ificationValue, portMAX_DELAY);
// 处理通知
}
}
void isr() {
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
vTaskNotifyGiveFromISR(taskHandle, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
void setup() {
xTaskCreate(taskCode, "TaskName", 10000, NULL, 1, &taskHandle);
attachInterrupt(digitalPinToInterrupt(pin), isr, RISING);
}在这个例子中,当引脚上的电平上升时,ISR会唤醒taskCode任务。taskCode任务在收到通知后可以处理中断事件。
互斥量
互斥量(Mutex)是一种同步机制,它可以用来保护共享资源,防止多个任务同时访问。当一个任务获得了互斥量,其他任务就不能获得该互斥量,直到该任务释放互斥量。
以下是一个使用互斥量的例子:
SemaphoreHandle_t mutex;
void taskCode(void * parameter) {
for (;;) {
xSemaphoreTake(mutex, portMAX_DELAY);
// 访问共享资源
xSemaphoreGive(mutex);
}
}
void setup() {
mutex = xSemaphoreCreateMutex();
xTaskCreate(taskCode, "TaskName1", 10000, NULL, 1, NULL);
xTaskCreate(taskCode, "TaskName2", 10000, NULL, 1, NULL);
}在这个例子中,两个任务都试图访问同一个共享资源。通过使用互斥量,我们可以确保在任何时候只有一个任务可以访问该资源,从而防止数据竞争和其他并发问题。
信号量
信号量(Semaphore)是一种计数同步机制,它可以用来控制对一组共享资源的访问。信号量的值表示可用资源的数量。当一个任务获得了信号量,信号量的值就会减一;当一个任务释放了信号量,信号量的值就会加一。
以下是一个使用信号量的例子:
SemaphoreHandle_t semaphore;
void taskCode(void * parameter) {
for (;;) {
xSemaphoreTake(semaphore, portMAX_DELAY);
// 访问共享资源
xSemaphoreGive(semaphore);
}
}
void setup() {
semaphore = xSemaphoreCreateCounting(3, 3);
xTaskCreate(taskCode, "TaskName1", 10000, NULL, 1, NULL);
xTaskCreate(taskCode, "TaskName2", 10000, NULL, 1, NULL);
xTaskCreate(taskCode, "TaskName3", 10000, NULL, 1, NULL);
}在这个例子中,我们有三个任务和三个共享资源。通过使用信号量,我们可以确保在任何时候最多只有三个任务可以访问共享资源。
五、实战代码
这是一个物联网花盆的代码,它运行在ESP32S3上,可以上传传感器信息至服务器,并从服务器接受控制信息
#include <Arduino.h>
#include <WiFi.h>
#include <PubSubClient.h>
#include "DHT.h"
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BMP280.h>
#include <BH1750.h>
const char *ssid = "809";
const char *password = "809809809";
const char *mqttServer = "192.168.3.222";
const int mqttPort = 1883;
#define DHTPIN 4 // Digital pin connected to the DHT sensor
#define DHTTYPE DHT11 // DHT 11
DHT dht(DHTPIN, DHTTYPE);
#define soil 10
#define STBY 38
#define AIN1 36
#define AIN2 39
#define sun_pin 15
#define SCL_PIN 8
#define SDA_PIN 9
#define Sub "js"
#define Pub "cgq"
const int flowPin = 47;
volatile int flowPulseCount;
const float pulsesPerLitre = 4834.0;
Adafruit_BMP280 bmp;
int sensorValue;
long sum = 0;
int vout = 0;
int uv = 0;
// PWM
int freq = 5000;
int channel = 10;
int resolution = 8;
float Humidity; // = dht.readHumidity();
// Humidity= dht.readHumidity();
float Temperature; // = dht.readTemperature();
// Temperature= dht.readTemperature();
double soil_moisture;
// soil_moisture= analogRead(soil);
uint16_t lux; //= lightMeter.readLightLevel();
// uint16_t lux = lightMeter.readLightLevel();
float BMP_Temperature; //= bmp.readTemperature()
// BMP_Temperature = bmp.readTemperature()
float BMP_Pressure; // bmp.readPressure()
// BMP_Pressure = bmp.readPressure()
float BMP_Approxaltitude; //=bmp.readAltitude(1013.25)
// BMP_Approxaltitude = bmp.readAltitude(1013.25)
float S_vout; //= vout;
// S_vout = vout;
WiFiClient espClient;
PubSubClient client(espClient);
void pulseCounter()
{
flowPulseCount++;
}
int readuv()
{
sensorValue = 0;
sum = 0;
for (int i = 0; i < 1024; i++)
{
sensorValue = analogRead(15);
sum = sensorValue + sum;
delay(2);
}
vout = sum >> 10;
vout = vout * 4980.0 / 1024;
if (vout < 50)
{
uv = 0;
}
else if (vout < 227)
{
uv = 1;
}
else if (vout < 318)
{
uv = 2;
}
else if (vout < 408)
{
uv = 3;
}
else if (vout < 503)
{
uv = 4;
}
else if (vout < 606)
{
uv = 5;
}
else if (vout < 696)
{
uv = 6;
}
else if (vout < 795)
{
uv = 7;
}
else if (vout < 881)
{
uv = 8;
}
else if (vout < 976)
{
uv = 9;
}
else if (vout < 1079)
{
uv = 10;
}
else
{
uv = 11;
}
delay(20);
return uv;
}
void callback(char *topic, byte *payload, unsigned int length)
{
Serial.println("Entered callback function");
int message;
for (int i = 0; i < length; i++)
{
message = payload[0]-48;
}
Serial.println(message);
if (message)
{
digitalWrite(37, HIGH);
Serial.println("high");
}
if (!message)
{
digitalWrite(37, LOW);
Serial.println("low");
}
}
void mqttSubscriberTask(void *pvParameters)
{
(void)pvParameters;
Serial.println("Entered callback function111");
for (;;)
{
client.loop();
// ledcWrite(LEDC_CHANNEL_1, motorSpeed);
vTaskDelay(10 / portTICK_PERIOD_MS); // wait for 10 ms
}
}
void mqttPublisherTask(void *pvParameters)
{
(void)pvParameters;
pinMode(flowPin, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(flowPin), pulseCounter, RISING);
for (;;)
{
Humidity = dht.readHumidity();
Temperature = dht.readTemperature();
// Pressure= bmp280.readPressure()/ 100.0F;
soil_moisture = analogRead(soil);
BMP_Temperature = bmp.readTemperature();
BMP_Pressure = bmp.readPressure();
BMP_Approxaltitude = bmp.readAltitude(1013.25);
S_vout = vout;
String sensorData = "{";
sensorData += "\"temperature\":";
sensorData += String(Temperature);
sensorData += ",\"humidity\":";
sensorData += String(Humidity);
sensorData += ",\"soil_moisture\":";
sensorData += String(soil_moisture);
sensorData += ",\"BMP_Temperature\":";
sensorData += String(BMP_Temperature);
sensorData += ",\" BMP_Pressure\":";
sensorData += String(BMP_Pressure);
sensorData += ",\" BMP_Approxaltitude\":";
sensorData += String(BMP_Approxaltitude);
sensorData += ",\" The Photocurrent value : \":";
sensorData += String(S_vout) + "mV";
sensorData += ",\" UV Index = \":";
sensorData += String(readuv());
sensorData += ",\" flowPulseCount = \":";
sensorData += String(flowPulseCount);
sensorData += "}";
client.publish(Pub, sensorData.c_str());
Serial.println(sensorData);
vTaskDelay(500 / portTICK_PERIOD_MS); // wait for 5000 ms
}
}
void setup()
{
Serial.begin(115200);
WiFi.begin(ssid, password);
ledcSetup(channel, freq, resolution);
ledcAttachPin(AIN1, channel);
Wire.begin(SDA_PIN, SCL_PIN); // I2C��ʼ
if (!bmp.begin(0x76))
{
Serial.println(F("Could not find a valid BMP280 sensor, check wiring!"));
}
/* Default settings from datasheet. */
bmp.setSampling(Adafruit_BMP280::MODE_NORMAL, /* Operating Mode. */
Adafruit_BMP280::SAMPLING_X2, /* Temp. oversampling */
Adafruit_BMP280::SAMPLING_X16, /* Pressure oversampling */
Adafruit_BMP280::FILTER_X16, /* Filtering. */
Adafruit_BMP280::STANDBY_MS_500); /* Standby time. */
while (WiFi.status() != WL_CONNECTED)
{
delay(1000);
Serial.println("Connecting to WiFi...");
}
Serial.println("Connected to the WiFi network");
client.setServer(mqttServer, mqttPort);
while (!client.connected())
{
Serial.println("Connecting to MQTT...");
if (client.connect("ESP32Client"))
{
Serial.println("connected");
client.subscribe(Sub);
}
else
{
Serial.print("failed with state ");
Serial.print(client.state());
delay(2000);
}
}
// pinMode(35, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(18, OUTPUT);
pinMode(17, OUTPUT);
pinMode(37, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(STBY, OUTPUT);
pinMode(AIN2, OUTPUT);
digitalWrite(STBY, HIGH);
digitalWrite(AIN2, LOW);
pinMode(48, OUTPUT);
pinMode(45, OUTPUT);
digitalWrite(45, HIGH);
digitalWrite(48, LOW);
analogReadResolution(12);
dht.begin();
client.setCallback(callback);
digitalWrite(12, LOW);
digitalWrite(11, HIGH);
digitalWrite(18, LOW);
digitalWrite(17, HIGH);
xTaskCreatePinnedToCore(
mqttSubscriberTask, /* Task function. */
"mqttSubscriberTask", /* Name of task. */
10000, /* Stack size in words. */
NULL, /* Parameter passed as input of the task */
1, /* Priority of the task. */
NULL,
0); /* Task handle. */
xTaskCreatePinnedToCore(
mqttPublisherTask, /* Task function. */
"mqttPublisherTask", /* Name of task. */
10000, /* Stack size in words. */
NULL, /* Parameter passed as input of the task */
1, /* Priority of the task. */
NULL,
1); /* Task handle. */
}
void loop()
{
}
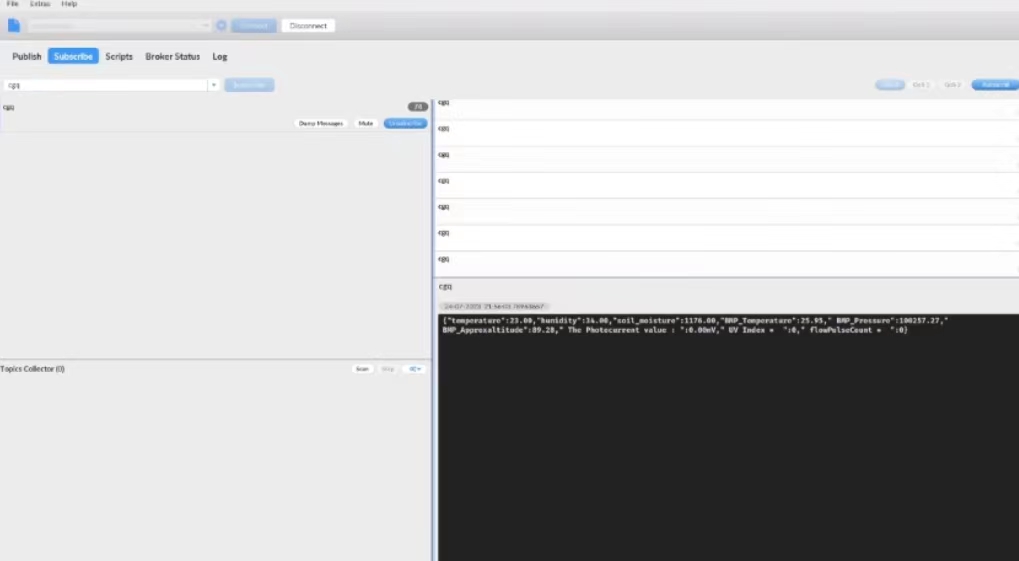
运行程序可以看到ESP32发送的cgq话题信息



评论(0)
您还未登录,请登录后发表或查看评论