
由于项目需要,想要作多雷达数据拼接和融合
本来想使用gazebo先进行仿真的,但是出现gazebo仿真多个雷达出现雷达数据一直闪烁的现象,具体如下图所示:
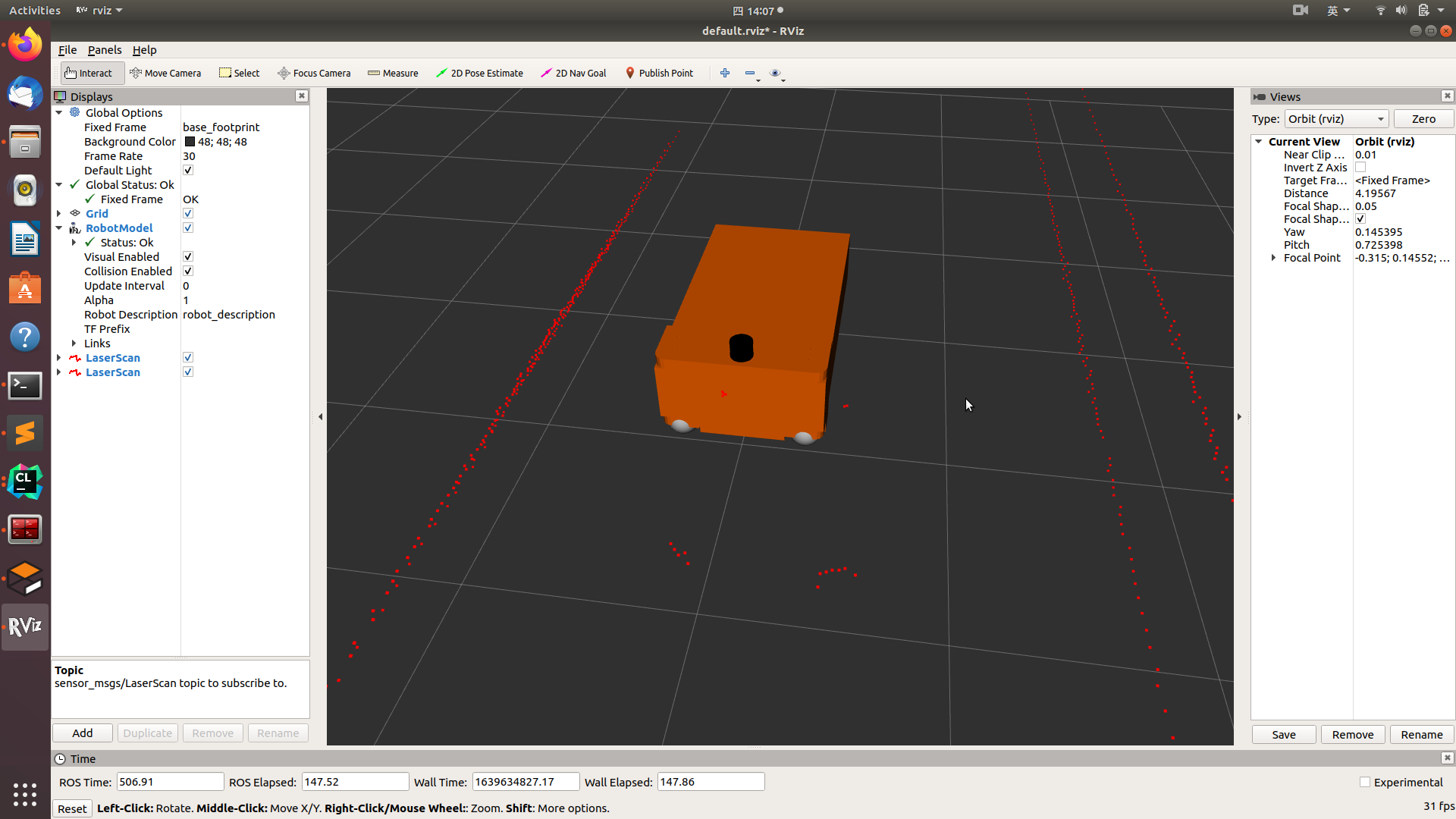
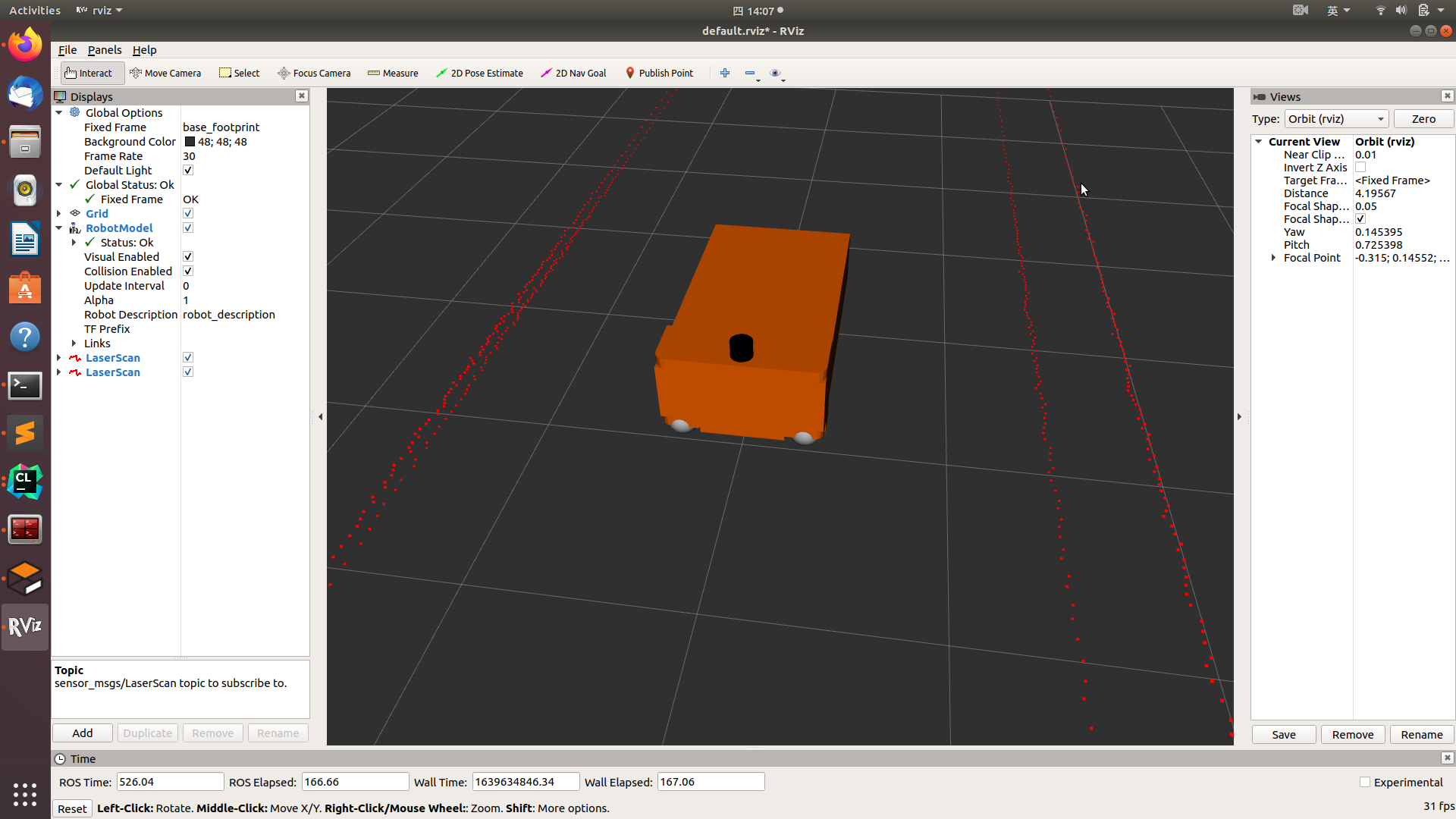

可以从这三张图像的对比看到,两个雷达显示的数据是一直左右闪烁的。
下面是我的雷达的xacro文件写法:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser topic_name:=scan plugin_name:=gazebo_rplidar" >
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<mesh filename="package://robot_description/stl/sutengjuchuangdaohangleida-mi.stl"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<mesh filename="package://robot_description/stl/sutengjuchuangdaohangleida-mi.stl"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3.14</min_angle>
<max_angle>3.14</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="${plugin_name}" filename="libgazebo_ros_laser.so">
<topicName>/${topic_name}</topicName>
<frameName>${prefix}_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
我是通过多次调用这个文件在小车上部署多个雷达的。
想请教下,这要怎么修改才能让雷达数据不再闪烁,而是基本上固定的呢?




第三方账号登入
QQ 微博 微信