
使用ur3_bringup 可以连接真实机械臂
使用官方的ur3_moveit_planning_execution.launch 可以对机械臂 moveit规划。
但是只有机械臂,没有夹爪。
官方如图:
我把原来的ur3_moveit_config 复制出来,修改
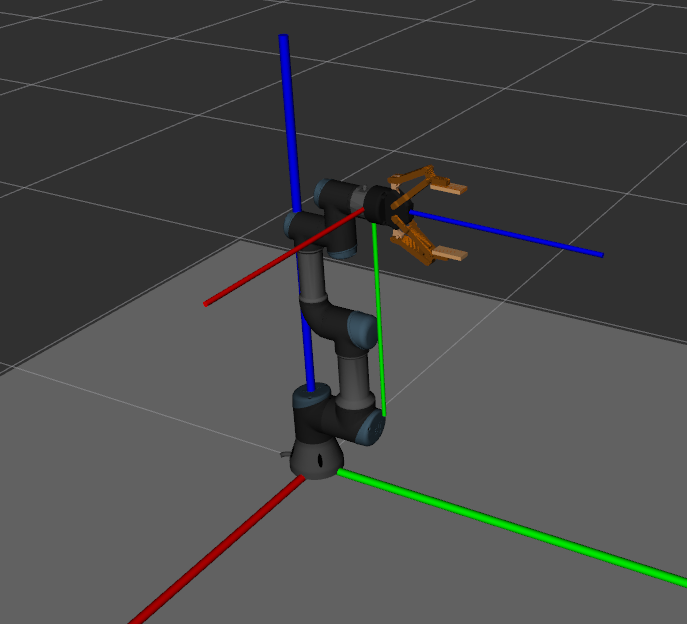
然后把ur3.xacro 等模型文件复制出来修改,修改完之后,有了夹爪,有了底盘。
规划组什么的使用moveit setup assistant 配置过了。
在rviz中可以笛卡尔空间规划了。
然后使用官方的ur3_bringup 连接真实机械臂,使用自己的my_ur3_new_moveit_config 不能控制真实机械臂。
请问我需要修改什么地方,或者有什么其他的方案
先给大佬磕一个,球球啦,救救孩子吧




第三方账号登入
QQ 微博 微信