
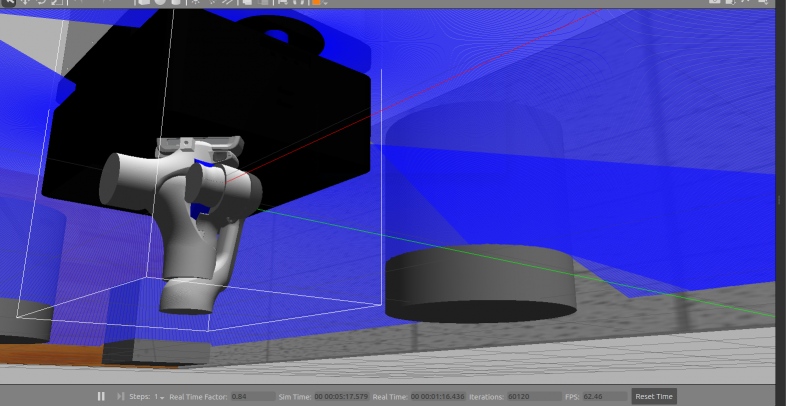
经过我的排查终于找到了问题:

上图中是我的机械臂夹爪的两个关节,当把关节中的<dynamics damping="500.0" friction="0.0"/> 注释掉后,再次在gazebo中仿真时,机械臂显示正常了,有大佬知道这是啥原因吗?
分界线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
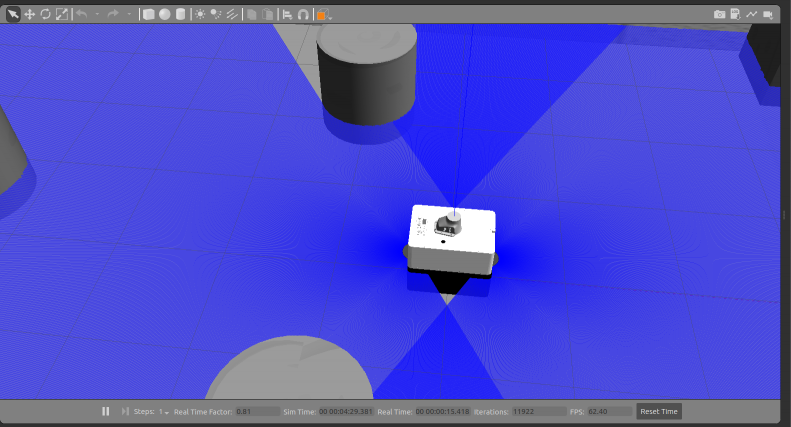
我的机器人在不加载world文件时打开是正常的:

但是一旦在gazebo的launch文件中加载world文件后,所有能活动的零件都跑到原点去了:
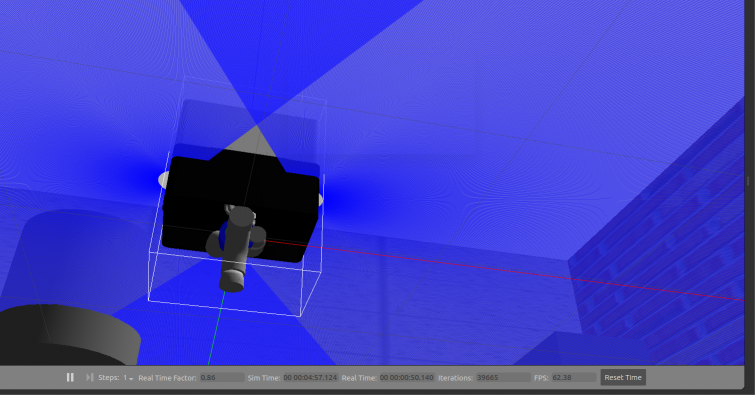
这是咋回事呀?




第三方账号登入
QQ 微博 微信