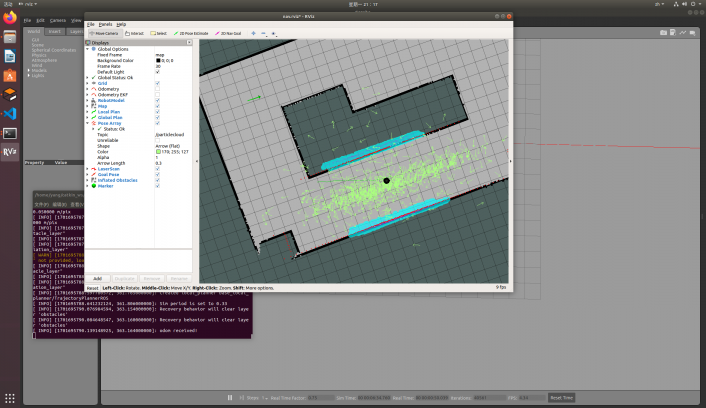
如图,在gazebo环境中进行导航,指定目标点后机器人不按照规划好的路线走,而是在原地附近乱晃。控制台没有红字报错。
您还未登录,请登录后发表或查看评论
《ROS移动机器人实战 • 古月》课程答疑交流,课程链接:https://class.guyuehome.com/detail/p_621c37b6e4b0beaee42e6ff9/6?fromH5=true
第三方账号登入
看不清?点击更换





第三方账号登入
QQ 微博 微信