ROS2的相关课程第一次开设的时间是在2017年的“智能机器人技术综合实训课程说明”(2017-2018-1学期)。当时以一个专题的形式进行简要介绍,2018年扩展了安装、基础、导航等内容(2018-2019-1学期)。The ROS2 course was first held in 2017, “Instructions for Integrated Robotics Training Courses” (2017-2018-1 semester). At that time, a brief introduction was made in the form of a topic. In 2018, the installation, foundation, navigation and other contents were expanded (2018-2019-1 semester).
本学期(2019-2020-1)是ROS2课程第三次迭代更新。课程重心由ROS1转向ROS2。在介绍讲解ROS2的同时,复习回顾ROS1,毕竟没有必要学习太多必将淘汰的技术和工具,时间成本过高。This semester (2019-2020-1) is the third iteration of the ROS2 course. The focus of the course shifted from ROS1 to ROS2. While introducing ROS2, reviewing ROS1, after all, there is no need to learn too many technologies and tools that will be eliminated, and the time cost is too high.
机器人操作系统二会有十分详细的教程,随课程同步更新,在开始前,准备了四部预告篇,分别为:ROS2 will have a very detailed tutorial, which will be updated synchronously with the course. Before the start, four pre-posted articles are prepared, namely:
- 启程
Departure:https://blog.csdn.net/ZhangRelay/article/details/98627866
- 修行 Taoism:https://blog.csdn.net/ZhangRelay/article/details/99838651
- 仿真
Simulation:https://zhangrelay.blog.csdn.net/article/details/99932959
- 实践
Practice:https://blog.csdn.net/ZhangRelay/article/details/99937033
只是为了方便大家了解ROS2的全貌,觉得不合适就跳过,觉得合适就继续。(本校学生必修)
ROS2和ROS1使用最多的三维仿真环境是Gazebo,推荐版本号为9+。可视化工具为rviz2。第三方仿真环境通常有Webots和V-Rep。The most used 3D simulation environment for ROS2 and ROS1 is Gazebo, the recommended version is 9+. The visualization tool is rviz2. Third-party simulation environments are usually Webots and V-Rep.
当然,学习ROS免不了试一下turtlesim(二维环境),具体参考“
ros2之turtlesim”。Of course, learning ROS is inevitable to try turtlesim(2D). Refer to “turtlesim of ros2” for details.
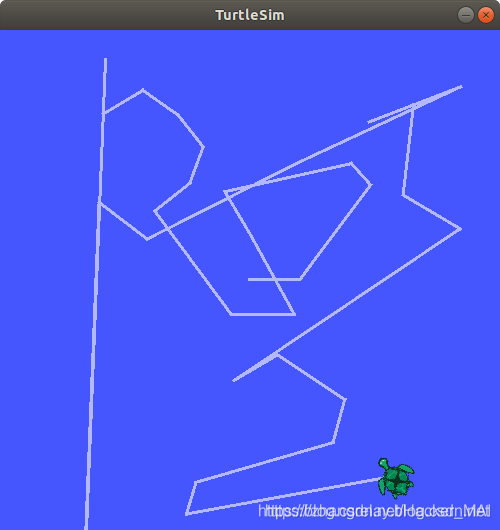
turtlesim 小乌龟仿真
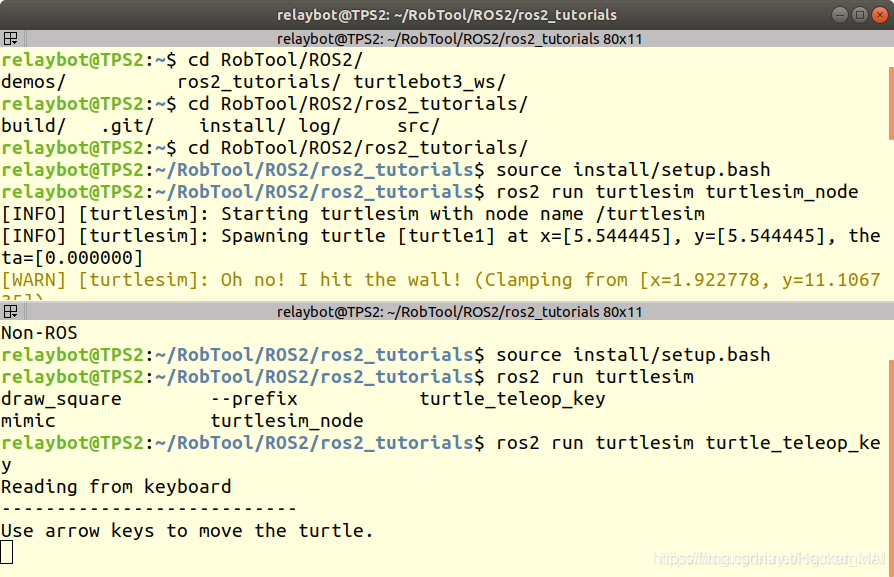
terminal
另一个有趣的例子就是turtlebot3啦。Another interesting example is turtlebot3.
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
这里注意launch文件的规则,ROS2与ROS1差别较大,简单一点的例子可以参考turtlesim习题。
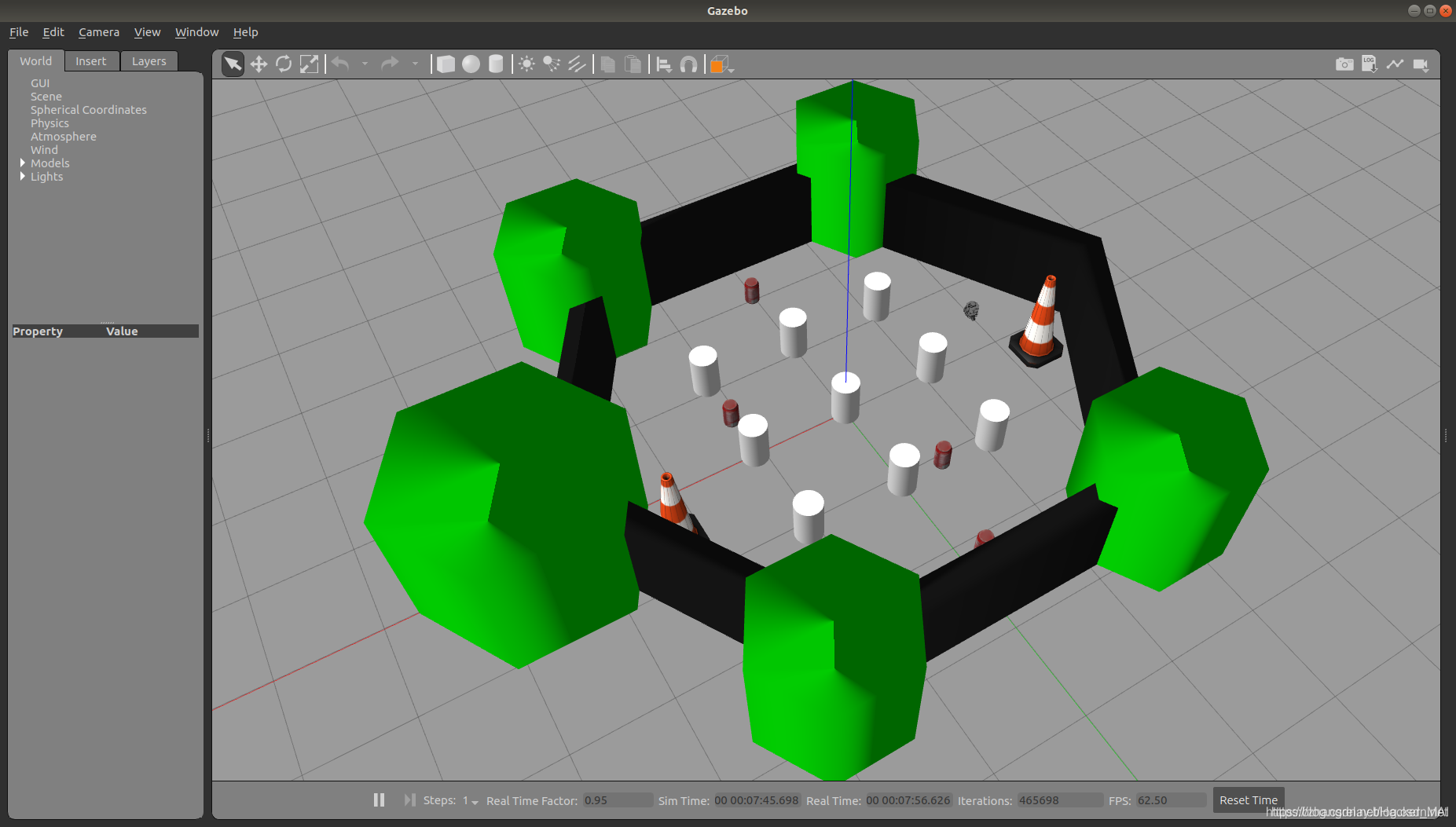
turtlebot3 gazebo
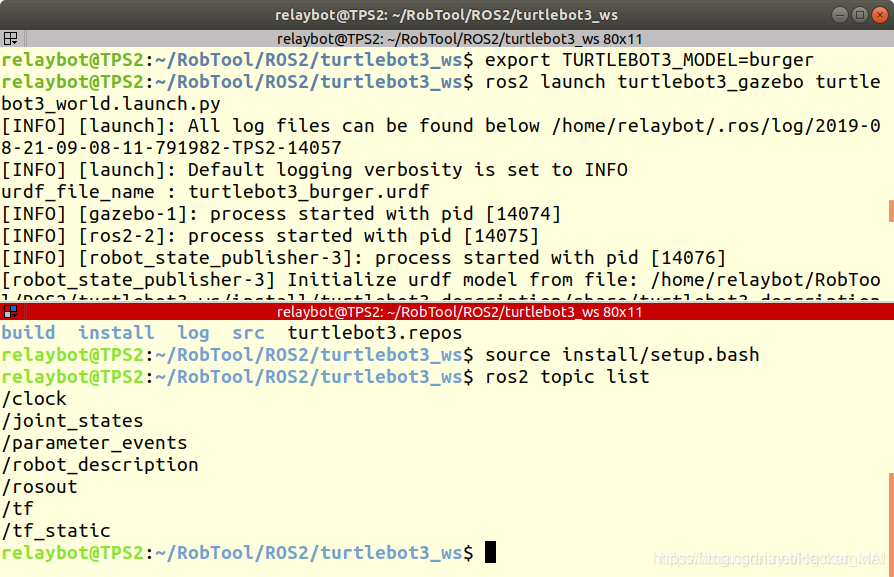
terminal


评论(0)
您还未登录,请登录后发表或查看评论