文章目录
- 一、介绍
- 二、准备网格模型
- 三、将网格模型添加到sdf文件中
一、介绍
具有纹理和3D网格的模型可以改善您的视觉体验,更重要的是可以改善环境的真实感。将这些信息提供给视觉处理算法的模拟,摄像机也将从实际模型中受益。
在本节中,我们将使用Velodyne网站上提供的3D网格来改善模型的视觉外观。更多制造商正在提供3D网格,但是有时可能很难找到现有的网格。在这些情况下,您可以尝试创建网格,与建模师合作或直接与制造商联系。
Velodyne 的网站上有HDL-32 的STEP文件。gazebo只能使用STL,OBJ或Collada文件,因此我们必须转换此文件,然后将其添加到模型中。
二、准备网格模型
1、在官网中找到并下载
STEP模型
2、如果您使用的是Ubuntu,则可以使用以下命令安装freecad:
sudo apt-get install freecad,windows下有很多方法,这里就不赘述了。用以下命令打开模型(cd到文件目录)
freecad HDL32E_Outline_Model.STEP
3、单击左侧面板
Labels & Attributes中的“HDL32 OUTLINE MODEL”来选择Velodyne的底座。
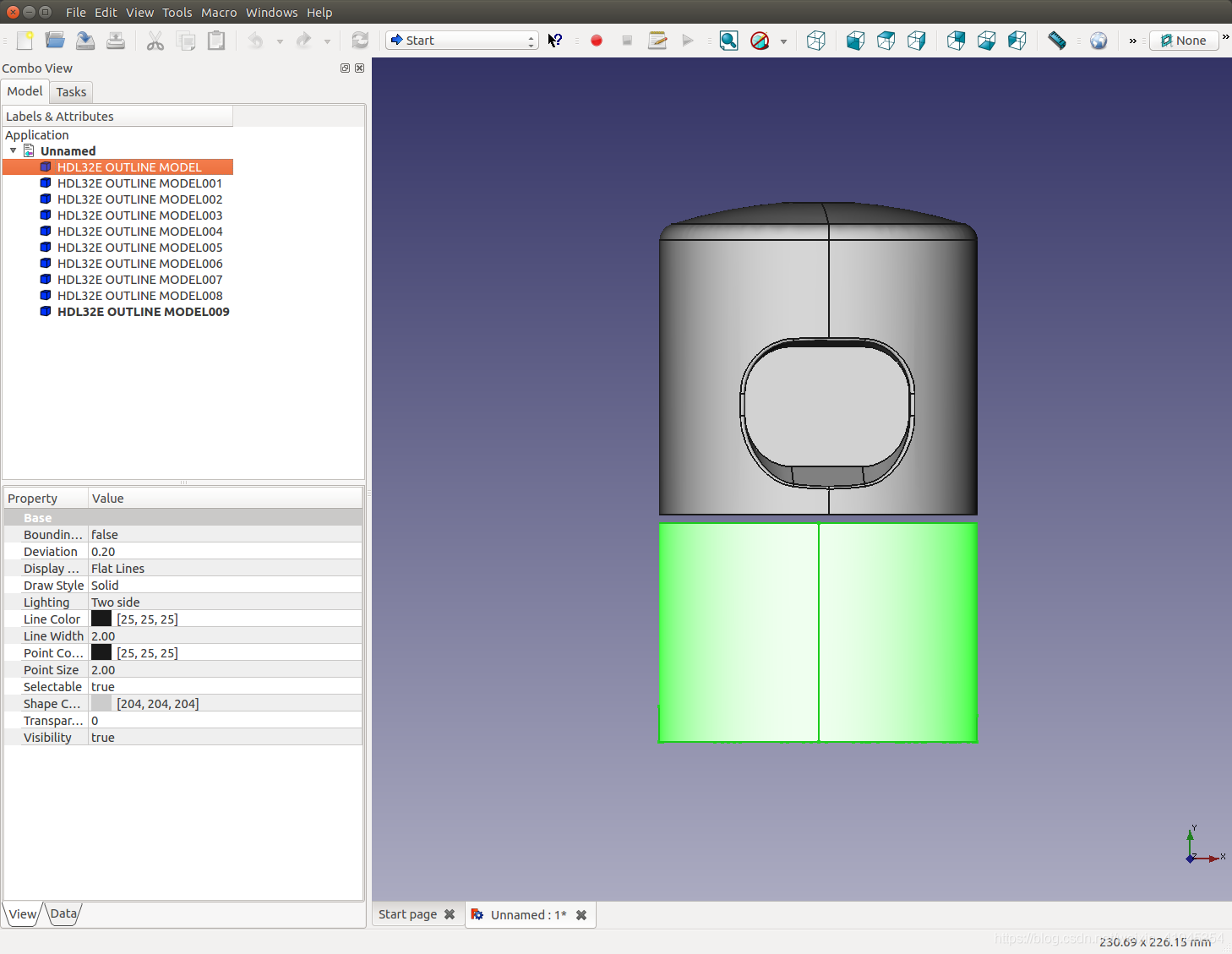
4、通过
File->Export,将模型导出到名为
velodyne_base.dae的文件中。
5、我们需要在Blender中修改
velodyne_base.dae文件 ,因为单位不正确,并且我们希望网格以原点为中心。
blender
6、依次点击
File->Import->Collada,导入
velodyne_base.dae文件。
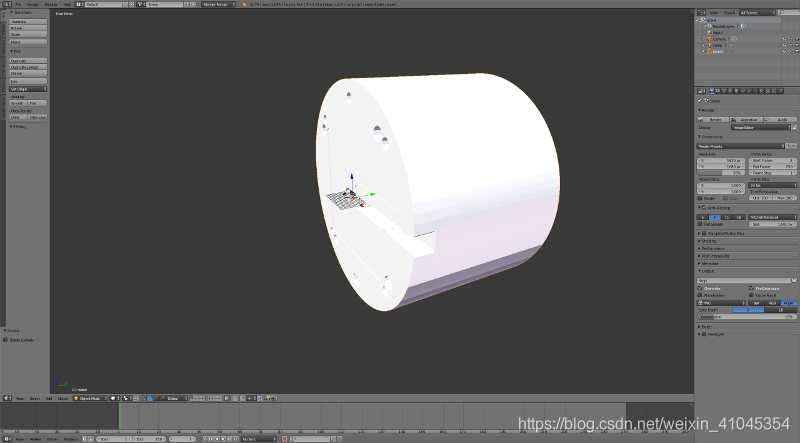
7、当前单位是毫米,而gazebo的单位是米。模型的坐标轴也不是我们希望的,我们需要其顶部朝向Z轴,即沿x轴旋转90°
8、拉出blender右选项卡(在渲染窗口右上角附近寻找加号)。在
Dimensions 此标签下的部分下,将x,y,z分量除以1000。
9、在同一标签中,将模型绕X轴旋转90度。效果参见下图。
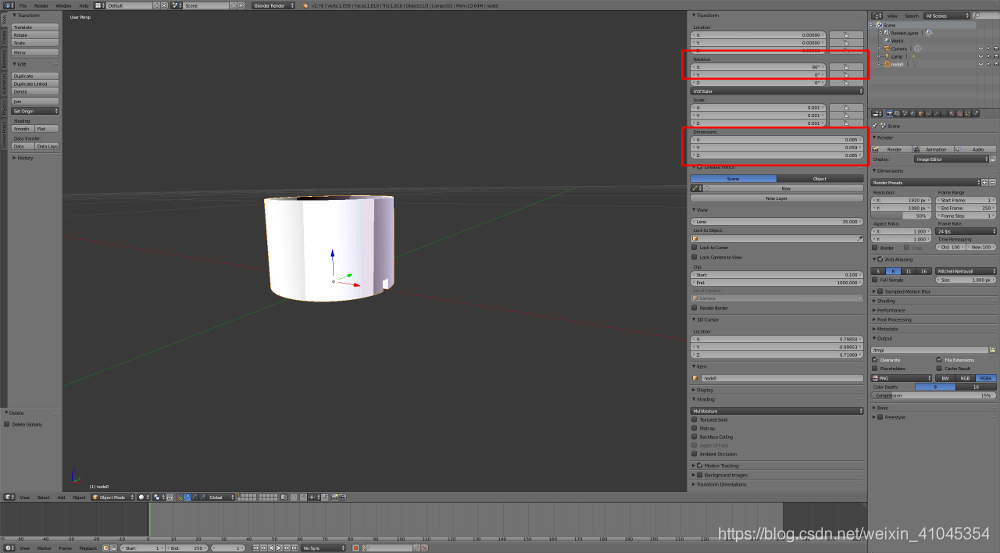
10、以此点击
File->Export->Collada,导出我们的模型
11、对Velodyne的顶部模型重复此过程。在FreeCAD上,将“ HDL32E OUTLINE MODEL006”导出为
velodyne_top.dae。还必须平移此网格文件,以使底部位于XY平面上。使用左上方的
Translate按钮(单击两次以在左下方打开对话框),将模型沿Z轴向下移动-0.06096。

此时,您应该有两个网格文件:
velodyne_base.dae和
velodyne_top.dae。如果以上步骤实在有问题,这里我已经给大家准备好这两个文件了,大家直接复制全文,创建一个新的dae文件黏贴就OK了
三、将网格模型添加到sdf文件中
亭定义了一个模型目录结构,该结构支持独立模型,并能够通过在线模型数据库共享模型。Gazebo模型结构的另一个好处是,它可以方便地组织模型所需的资源,例如网格文件。在本节中,我们将创建Velodyne SDF模型,并在其中添加两个网格文件
velodyne_base.dae和
velodyne_top.dae
1、命令行中输入以下命令创建目录。由于Gazebo知道模型路径,因此我们直接将目录放置在
~/.gazebo/models中,这样就不用另外设置了,
mkdir ~/.gazebo/models/velodyne_hdl32
2、创建文件
model.config。用于记录模型需要一些信息。包括引用的模型描述文件(xxx.sdf)
gedit ~/.gazebo/models/velodyne_hdl32/model.config
配置文件内容如下;
<?xml version="1.0"?>
<model>
<name>Velodyne HDL-32</name>
<version>1.0</version>
<sdf version="1.5">model.sdf</sdf>
<author>
<name>Optional: YOUR NAME</name>
<email>Optional: YOUR EMAIL</email>
</author>
<description>
A model of a Velodyne HDL-32 LiDAR sensor.
</description>
</model>
3、将上一篇
velodyne.world 中的内容复制到
model.sdf里面,只保留
<?xml>,
<sdf> 和
<model>这三个块, 去掉以下部分:
<include>块,该块包含光线和地面两部分<world>标签,注意是标签,不要删除里面内容
4、启动gazebo选择
Insert左侧的标签,然后向下滚动以找到
Velodyne HDL-32。
单击
Velodyne HDL-32,然后在渲染窗口中单击鼠标左键以生成模型。
5、在velodyne_hdl32文件夹下创建meshes文件夹并将两个dae文件放入其中,接下来我们编辑sdf文件,在
<visual>块中将原本的
<cylinder>内容替换为
<mesh>
<visual name="top_visual">
<geometry>
<!-- The mesh tag indicates that we will use a 3D mesh as
a visual -->
<mesh>
<!-- The URI should refer to the 3D mesh. The "model:"
URI scheme indicates that the we are referencing a Gazebo
model. -->
<uri>model://velodyne_hdl32/meshes/velodyne_top.dae</uri>
</mesh>
</geometry>
</visual>
重新加载模型后我们可以看到以下效果:
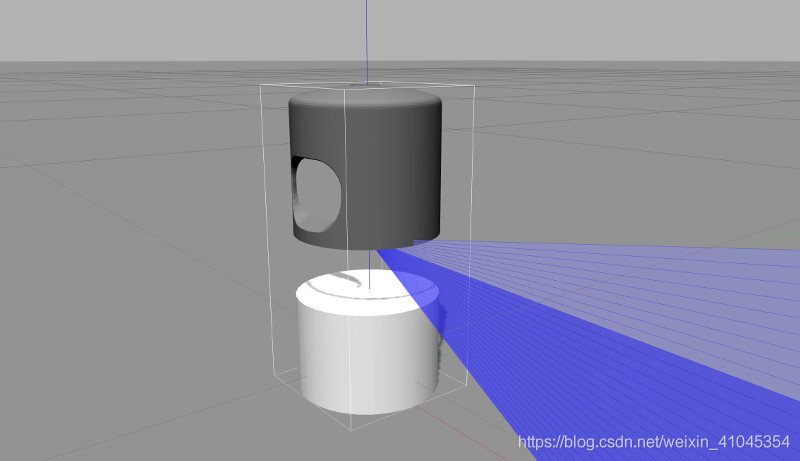
通过初始化位置来纠正摆放(
<pose>标签)
<visual name="top_visual">
<!-- Lower the mesh by half the height, and rotate by 90 degrees -->
<pose>0 0 -0.0376785 0 0 1.5707</pose>
<geometry>
<mesh>
<uri>model://velodyne_hdl32/meshes/velodyne_top.dae</uri>
</mesh>
</geometry>
</visual>
6、主体部分同样如此
<visual name="base_visual">
<!-- Offset the visual by have the base's height. We are not rotating
mesh since symmetrical -->
<pose>0 0 -0.029335 0 0 0</pose>
<geometry>
<mesh>
<uri>model://velodyne_hdl32/meshes/velodyne_base.dae</uri>
</mesh>
</geometry>
</visual>
最后我们得到了含真实样子的传感器模型了






评论(0)
您还未登录,请登录后发表或查看评论