

这一部分主要参考B站老王同志的贝叶斯滤波部分,贴上链接,建议多多支持老王成果

1. 概率论基础
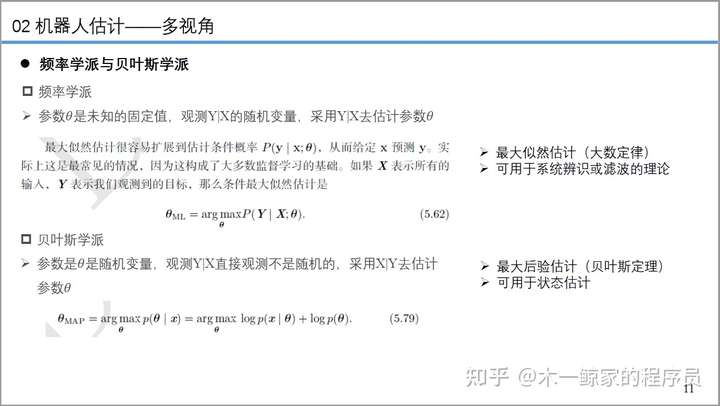
首先介绍的是频率学派与贝叶斯学派
个人理解是这样的:
频率学派认为参数是固定的,而观测是随机变量,可以通过观测去估计参数,也就是所谓的最大似然估计,其理论基础是大数定律;这个类似于系统辨识中的参数估计
贝叶斯学派反之,认为参数是随机变量,而观测不是随机变量,可以通过后验去估计参数,也就是所谓最大后验估计,其理论基础是贝叶斯定理;这个就类似于状态估计啦
接下来是随机过程
需要理解随机试验,主观概率与客观概率
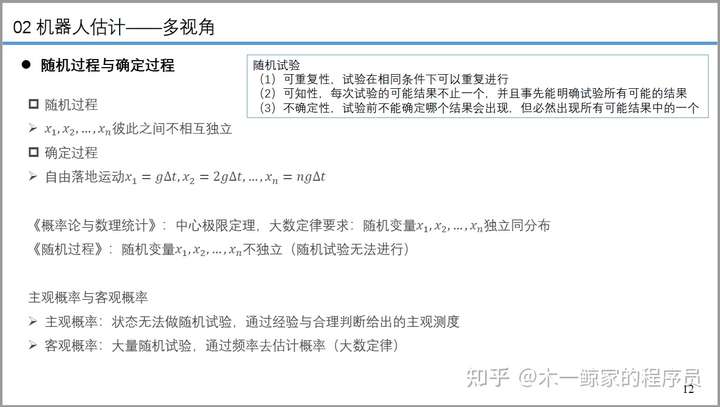
以及随机过程中,概率的演化

而贝叶斯学派的核心:
选择一个相当宽泛的(高熵)先验分布,反映在观测到数据前,参数的高度不确定性;通过观测数据得到一个相对狭窄的(低熵)的后验分布
2. 贝叶斯定理的三大分布
条件概率分布为:
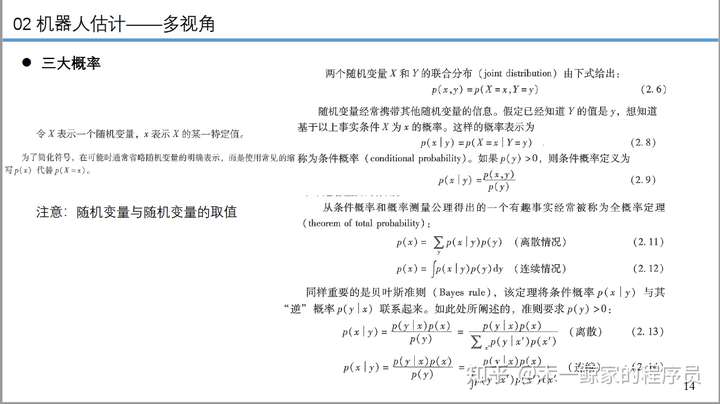
在状态分布中三个概率分别为:先验分布,后验分布与似然分布

注意:贝叶斯推断与传感器模型无关,正比于 先验 * 似然
似然模型可以选择多种概率分布:

3. 控制与观测下的信息融合
基于机器人与环境交互下的状态方程与观测方程
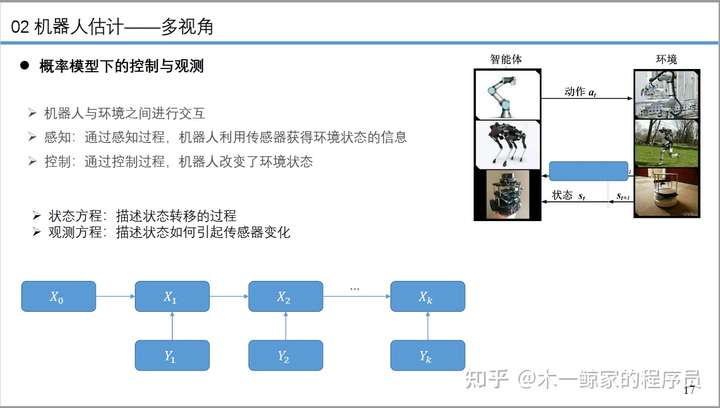
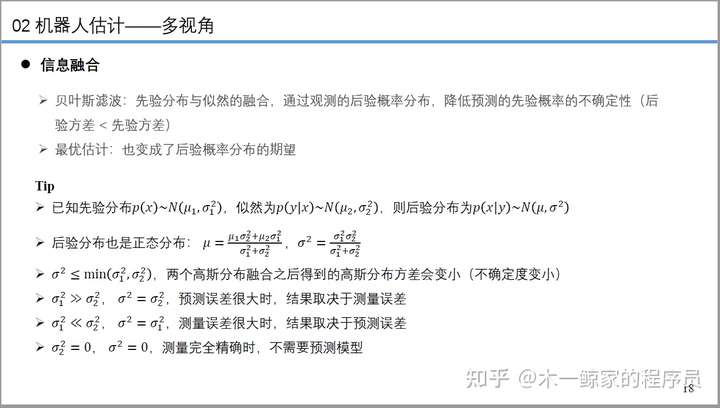
而信息融合也就是贝叶斯滤波的思想:
贝叶斯滤波:先验分布与似然的融合,通过观测的后验概率分布,降低预测的先验概率的不确定性(后验方差 < 先验方差)
4. 贝叶斯滤波的推导
可以参考这位大佬写的博文
以下仅仅是复制,
或者说纠正几个笔误
(1)三个Tip:其中两个是状态与噪声之间的相互独立性,一个是条件概率的推断

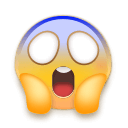
(2)连续变量贝叶斯定理的推导
(3)预测步的推导

(4)更新步的推导

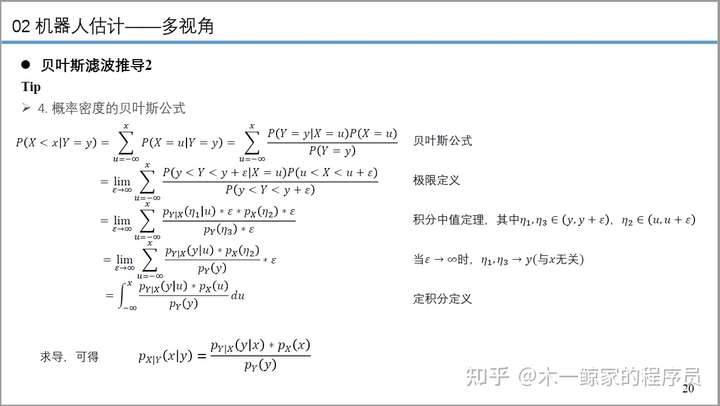
5. 贝叶斯滤波算法
老王的B站应该是写的最好理解的贝叶斯滤波了,笔者也是跟着在学习
本文也是主要参考一下两篇,侵删
Reference




评论(0)
您还未登录,请登录后发表或查看评论