文章目录
- Matlab 仿真——直流电机速度控制(2)系统分析
- 0. 被控对象与设计要求
- 1. 开环响应
- 2. LTI 模型特征
- 3. 其他输入信号的响应
- 4. 引用
Matlab 仿真——直流电机速度控制(2)系统分析
上一节我们成功在matlab建立好了电机系统模型,这一节我们来分析这个系统的时域响应
0. 被控对象与设计要求
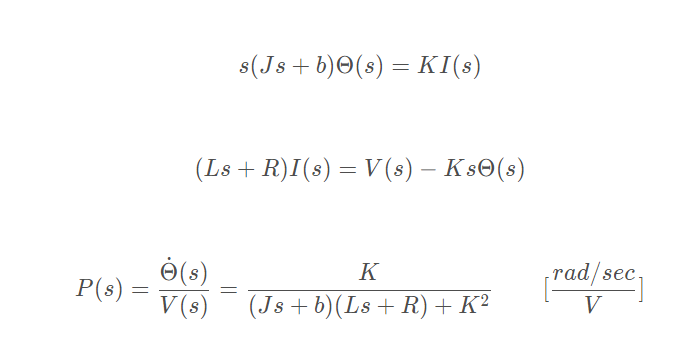
这里把设计需求和系统转换方程粘贴在这里:
设计需求(阶跃响应):
转换方程:
1. 开环响应
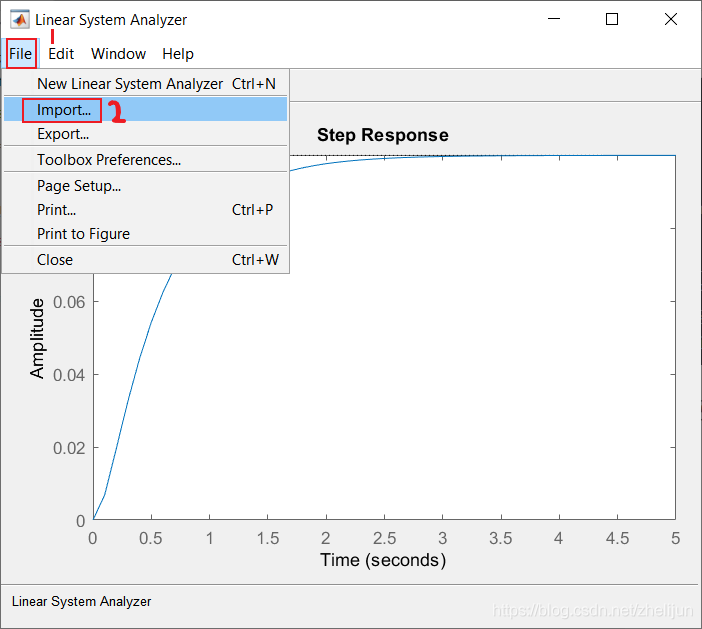
让我们看看该系统的开环响应如何,是否满足我们对电机的要求。matlab自带了线性系统分析工具。
Matlab运行以下代码
%motor parameter
J = 0.01;
b = 0.1;
K = 0.01;
R = 1;
L = 0.5;
%motor tf function
s = tf('s');
P_motor = K/((J*s+b)*(L*s+R)+K^2)
%求系统P_motor的阶跃响应,时间为0到5秒,步长0.1s
linearSystemAnalyzer('step',P_motor,0:0.1:5);
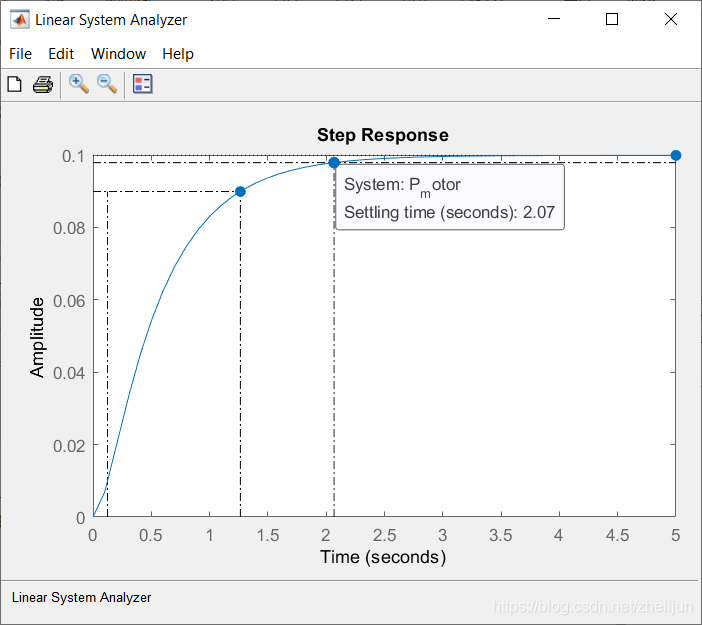
输出

在窗口上右击选择要显示的数据,我们得到系统的稳定时间为2.07秒,终值为0.0999。稳定时间不满足我们的要求。
2. LTI 模型特征
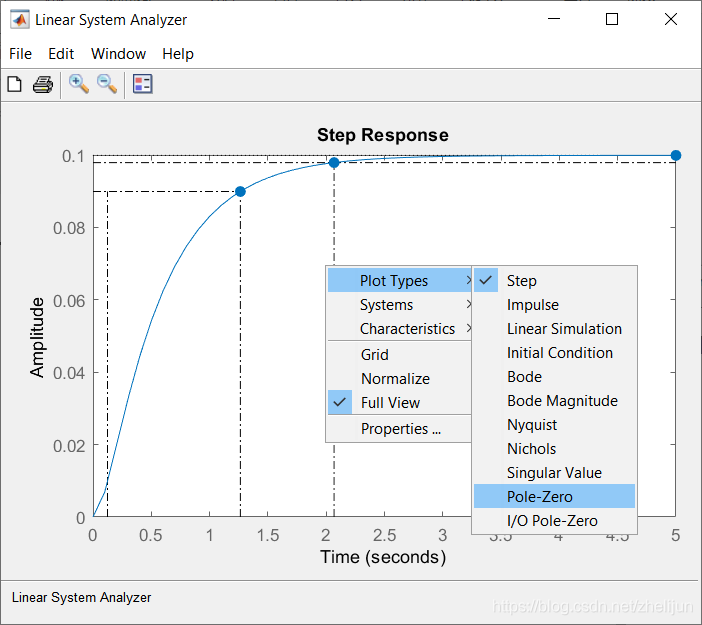
我们选择该系统的零极点图来观察
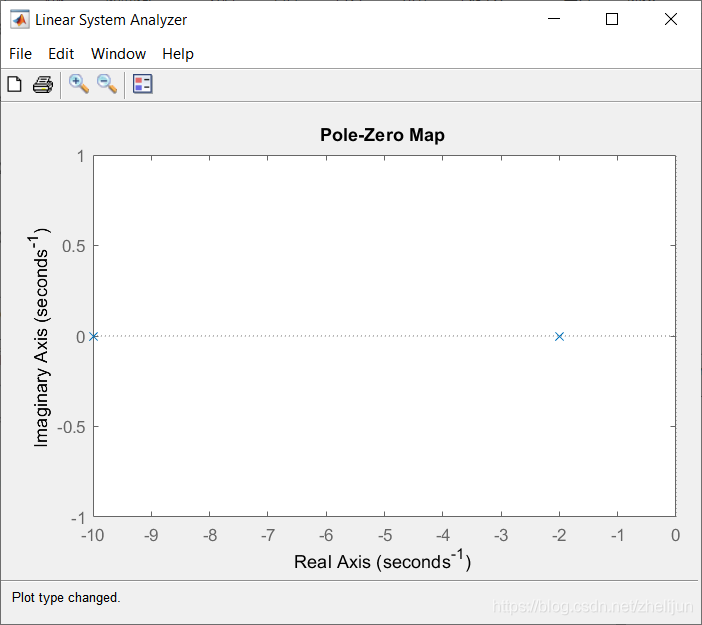
发现该系统有两个实极点,一个在-2处, 一个在-10处。也
因为极点没有虚部,所以系统不存在震荡。根据现代控制系统的知识,我们推测-2处的极点主导了系统的响应。为了验证这个想法,我们找到一个单极点的系统进行比较
rP_motor = 0.1/(0.5*s+1)。
代码如下
%motor parameter
J = 0.01;
b = 0.1;
K = 0.01;
R = 1;
L = 0.5;
%motor tf function
s = tf('s');
P_motor = K/((J*s+b)*(L*s+R)+K^2)
rP_motor = 0.1/(0.5*s+1);
%求系统P_motor的阶跃响应,时间为0到5秒,步长0.1s
linearSystemAnalyzer('step',P_motor,0:0.1:5);
在弹出的窗口里面我们导入新的系统阶跃响应
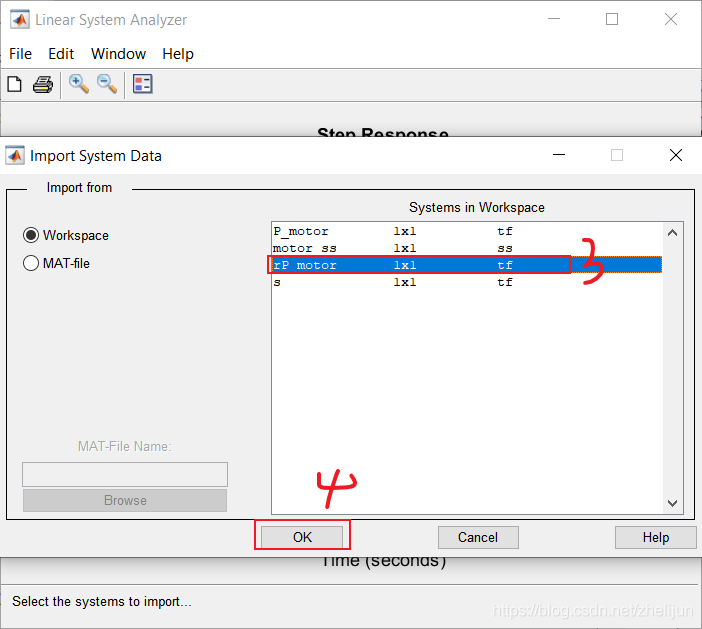
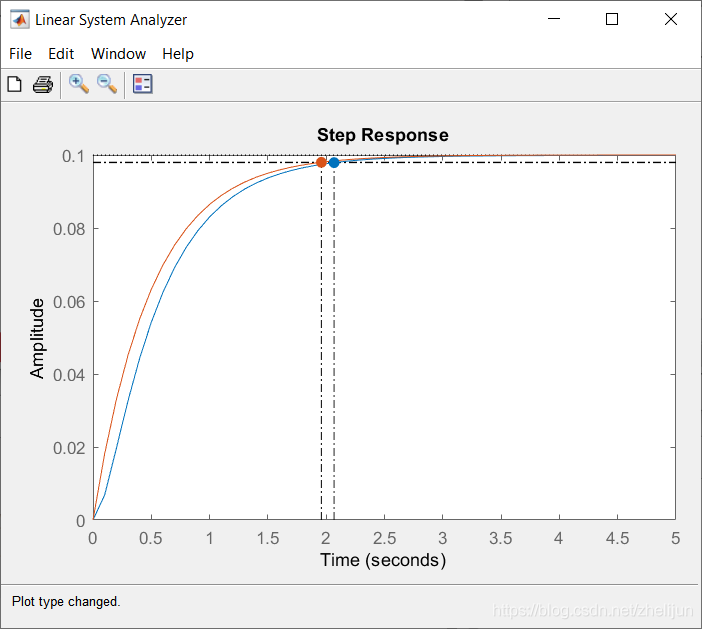
可以发现系统阶跃响应很接近,这印证了我们的猜想。
3. 其他输入信号的响应
除了阶跃响应,有时我们也想看看系统输入为其他输入信号时的情况。你可以直接导入你自己定义好的输入信号,或者用Matlab为你准备好的信号模板定制输入信号。接下来我们演示如何用模板信号。
右击,选择Plot Types——Linear Simulation

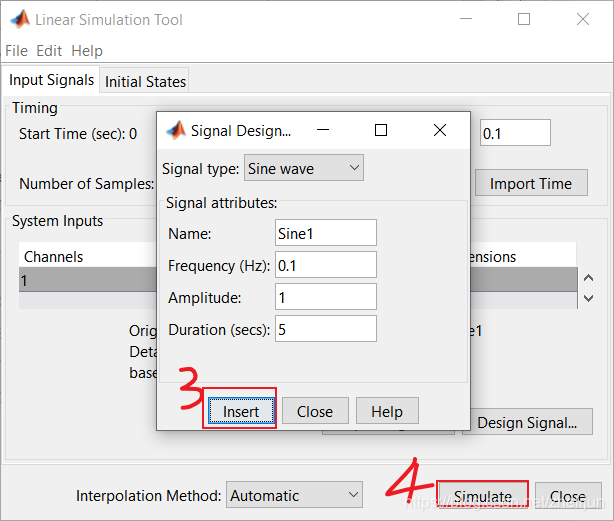
定义仿真时间,步长,然后点击设计信号
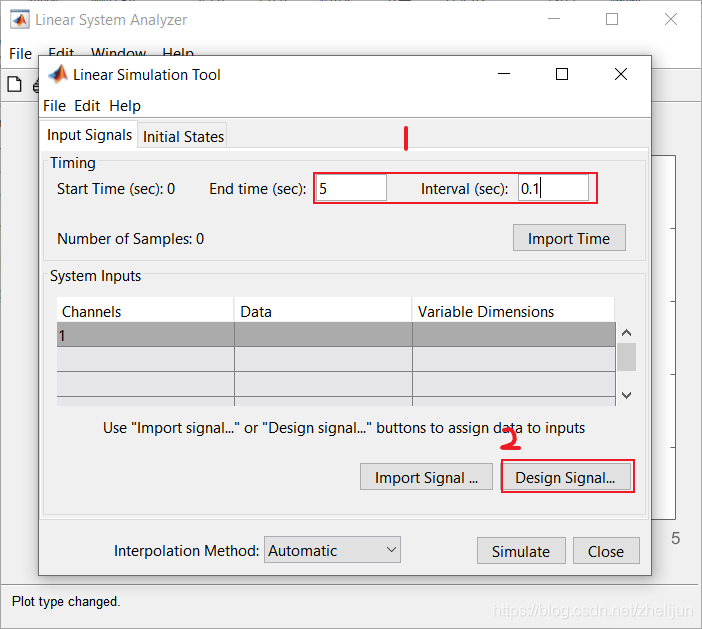
填写信号参数,插入,然后点击仿真
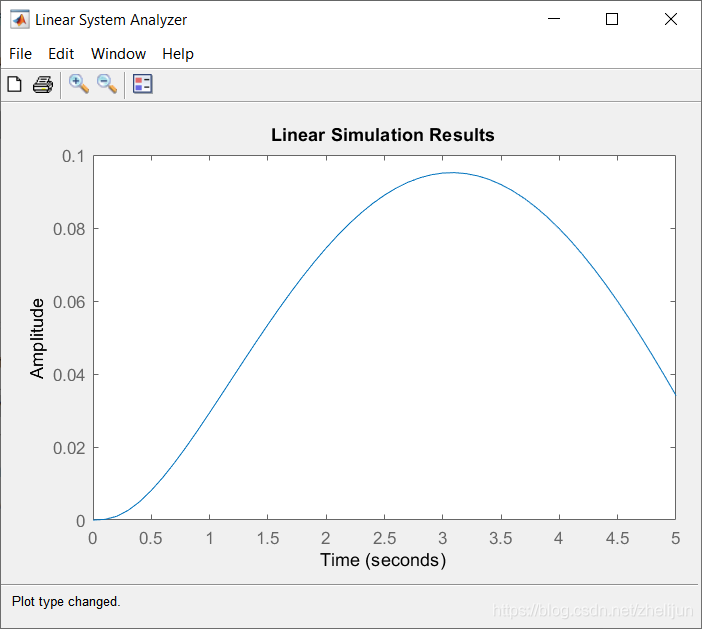
- 接着你就能看到新的输入型号的输出结果了
4. 引用






评论(0)
您还未登录,请登录后发表或查看评论