

ROS实操入门系列(八)ROS service通讯之自定义复杂srv消息类型解决实际需求(详解)
rossrv 命令
需求
自定义消息
编写代码
https://www.lanqiao.cn/courses/2947,提供准备好的云主机ros环境,进行实操,课程包括了 Topic 通讯, Service 通讯,ROS 自定义消息,URDF可视化,TF坐标转换等技术要点。每个技术点都会结合例子先把原理讲解清楚,为了达到学以致用的目的,我们会再进行知识拓展,针对每个技术点实现对应的生动有趣的需求,保证学完后会有很大的收获。
srv消息 是ROS service通讯节点间传递的内容。srv消息描述的是业务间传递数据,也可以理解为业务间数据的抽象化。
rossrv 命令
查看提供的service消息类型
rossrv list
查看某个类型的请求和响应
rossrv show 具体的消息类型
---分隔了request和response

需求
已知需要提供一套服务功能,此服务提供Team查询服务。要求是,提供一个Student数据,返回得到Team,实现这套服务,并且实现客户端调试调用。此处的需求没有实际的数据含义,我们只是为了演示复杂数据类型在ros的service通讯中如何传递使用。
根据分析,我们需要有一个ServiceClient节点和ServiceServer节点。ServiceClient节点传递请求数据(例如:学生信息Student)。ServiceServer节点处理请求数据,并且将Team结果返回。这里的Student数据正好和我们前面章节创建的/Student是一致的。这里的Team数据正好和我们前面章节创建到的Team是一致的。在此处,我们需要做的就是,定义一套数据传输规范来协调client和server的消息格式。
自定义消息
在Ros中,如果没有现成的消息类型来描述要去传递的消息时,我们会自定义消息。通常我们会新建一个Package来去自定义消息,这个Package一般不去写任何的业务逻辑,只是用来声明自定义的消息类型,可以只定义一种消息类型,也可以定义多种消息类型,根据业务需求来定。所以,我们会单独的创建一个package,用来定义消息.
创建package
包名取名也是有讲究的,业务名_srvs。大家可以看看std_srvs,都是遵循这个规则。
创建srv目录
在package包下新建srv文件夹
创建srv文件
在srv文件夹下创建.srv文件. srv文件就是自定义消息文件,用来描述消息格式的。例如案例中, 我们会去创建FindTeam.srv文件, 内容如下: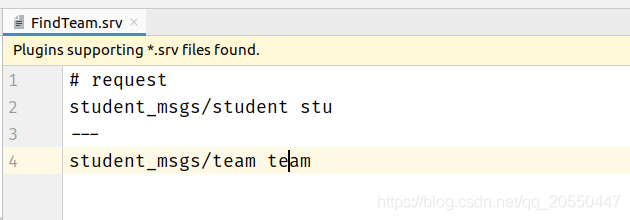
配置package.xml
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
配置CMakeLists.txt
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
geometry_msgs
)
add_service_files(
FILES
FindTeam.srv
)
这里的FindTeam.srv要和你创建的srv文件名称一致,且必须时在srv目录下,否则编译会出现问题
generate_messages(
DEPENDENCIES
std_msgs # Or other packages containing msgs
geometry_msgs
)
这个配置的作用是添加生成消息的依赖,默认的时候要添加std_msgs
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo_msg
CATKIN_DEPENDS roscpp rosmsg rospy message_runtime
# DEPENDS system_lib
)
为catkin编译提供了依赖 message_runtime
编译项目(如果遇到编译失败问题,请参考上一章的解决办法)
cd 工作空间
catkin_make
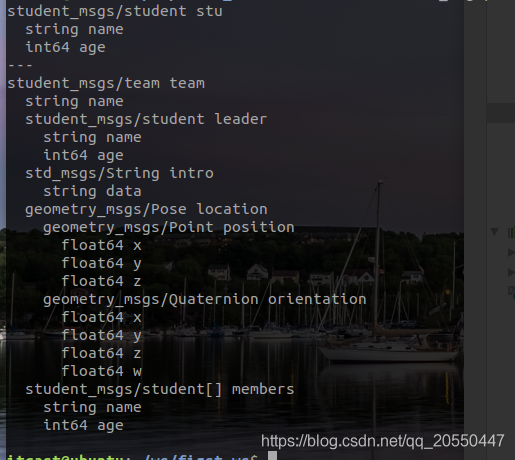
命令校验
rossrv show team_srvs/FindTeam
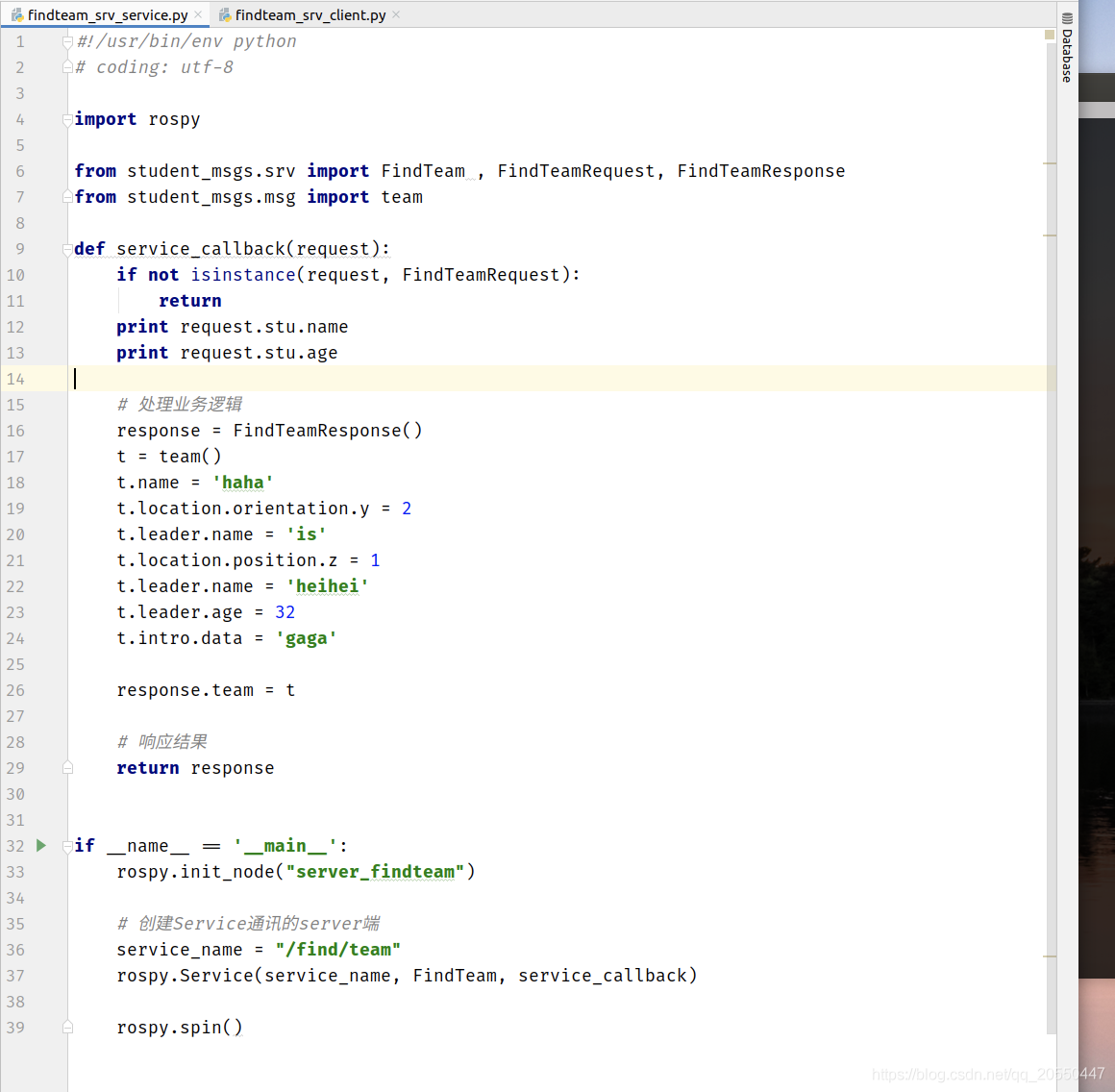
编写代码
-
编写server端
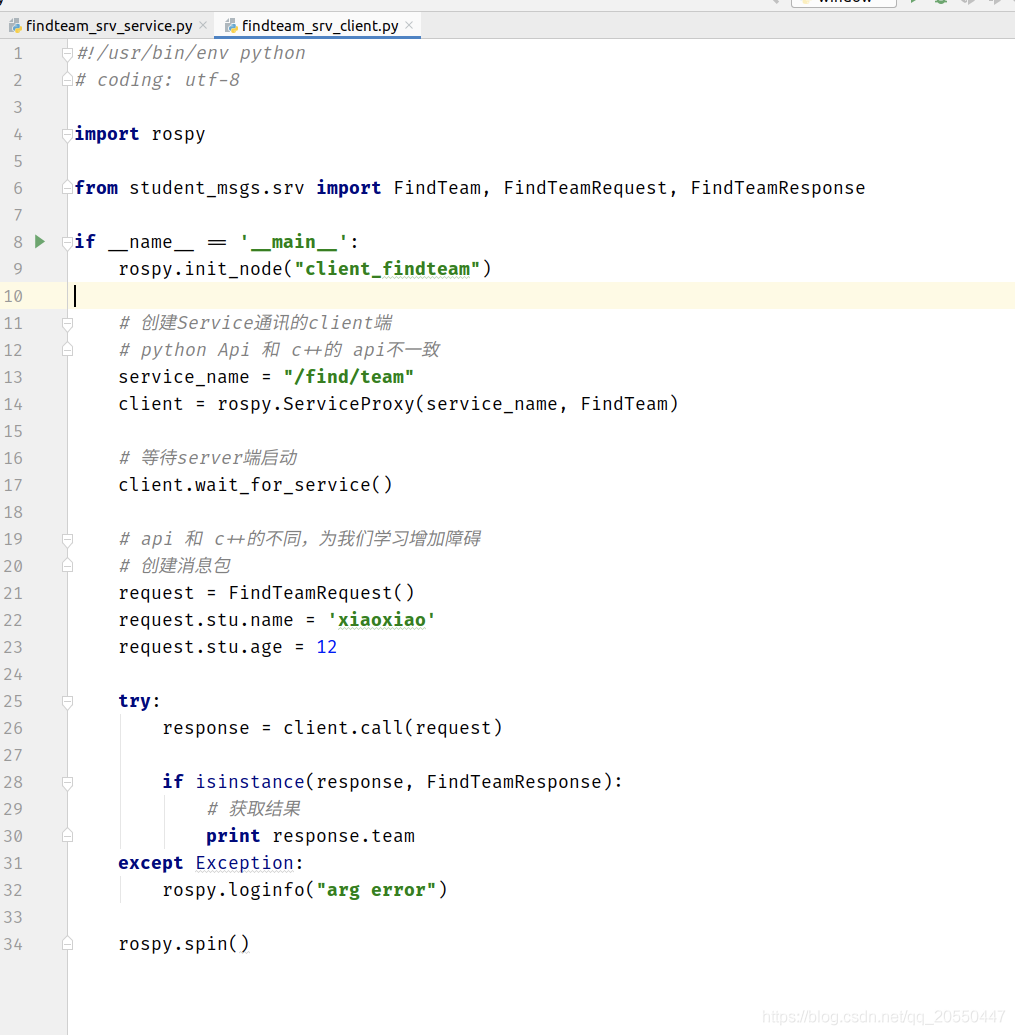
运行两个文件

https://www.lanqiao.cn/courses/2947,提供准备好的云主机ros环境,进行实操,课程包括了 Topic 通讯, Service 通讯,ROS 自定义消息,URDF可视化,TF坐标转换等技术要点。每个技术点都会结合例子先把原理讲解清楚,为了达到学以致用的目的,我们会再进行知识拓展,针对每个技术点实现对应的生动有趣的需求,保证学完后会有很大的收获。

评论(0)
您还未登录,请登录后发表或查看评论