

一、概述
由于轮式自动机械的移动(Mobility)能力受环境制约太大,遇到比较复杂的地面可能无法继续运动;其次,轮式机械的灵活度不如足式机器人,例如转弯、跳跃等一系列活动。足式系统的研究将会更大程度提升本体的速度、效率、环境适应性,应用场合格外空前,因此,足式机器人逐渐走进了实验室。
其中,步态是足式机器人运动的关键内容。步态的研究最早要追溯到1899年,Muybridge用连续摄影[1] 的方法,研究了动物的行走过程,步态的研究自此得以开展。步态分析是依据仿生的理念,通过对自然界生物的肢体运动的研究,揭示肢体运动与整个机体的运动及机体稳定性状态之间的关系,并给定某种机体状态下的步态周期和肢体运动模式,如行走、小跑、快跑等。
步态分析可分为静态步态分析和动态步态分析。静态步态分析主要研究在单种步态周期下,某时刻的肢体支撑相和摆动相的相位、机体此时的稳定状态;动态步态分析主要研究在同种步态下整个周期内机体的运动方向、机体的稳定性变化;以及研究不同步态切换对机体稳定性的影响、前行方向和速度的影响等。其中几个比较关键的定义:
1)步态周期::步态周期是指多足机器人完成一个步态所需的时间,也就是所有腿轮番完成一次“提起 -摆动-放下”的动作共花费的时间,在此过程中机器人机体也完成过渡过程;
2)占地系数:占地系数是指每条腿接触地面的时间和整个步态周期的比值;
3)步幅:机器人的重心在一个步态周期中的平移为步幅;
4)静态稳定性:步态的生成策略则取决于机器人的步行稳定性,即在步态生成时必须进行稳定性分析。对于多足机器人,在任何时候都要有足够多的腿立足于地面支撑机器人机体,才能确保它静态稳定地步行。通常,至少需要三条这样的腿,并且由这三条腿的立足点构成的三角形必须包围机器人的重心垂直投影,机器人步行时,虽然这个三角形区域是不停变化的,但只要机器人重心投影始终在这个交替变化的区域内,则机器人的步行就是稳定的.
二.步态分析
这里用到Matlab中simulink进行,simulink是一款非常便捷使用的仿真模块,可对动态系统进行建模、仿真和分析,可以通过在命令行直接输入
simulink系统会自动打开,也可以从菜单栏中点击图标进入

图1 simulink模块位置
在MATLAB中,自带了一个双足步态机器人的仿真,其采用的三维模型如图2所示,自然界中双足行走的生物以灵长类、家禽等最为典型,可以进行行走、小跑、跳跃、奔跑,甚至可以实现单腿弹跳等一系列动作。为了保证双足行走运动的稳定性和连续性,生物机体的重心需要随着肢体的交替轮换而前后上下进行动态调整。

图2 双足机器人三维模型图
可以在命令行中输入:
sm_import_humanoid_urdf可以自动打开这个仿真模型,如图3所示,运行后可以发现,自带的这个模型是顺拐机器人。也就是说,胳膊的摆动相位和腿部的摆动相位错乱导致同向摆动,对运动平衡是不利的,主要的原因在于模型中左右腿的hip关节相位反了。
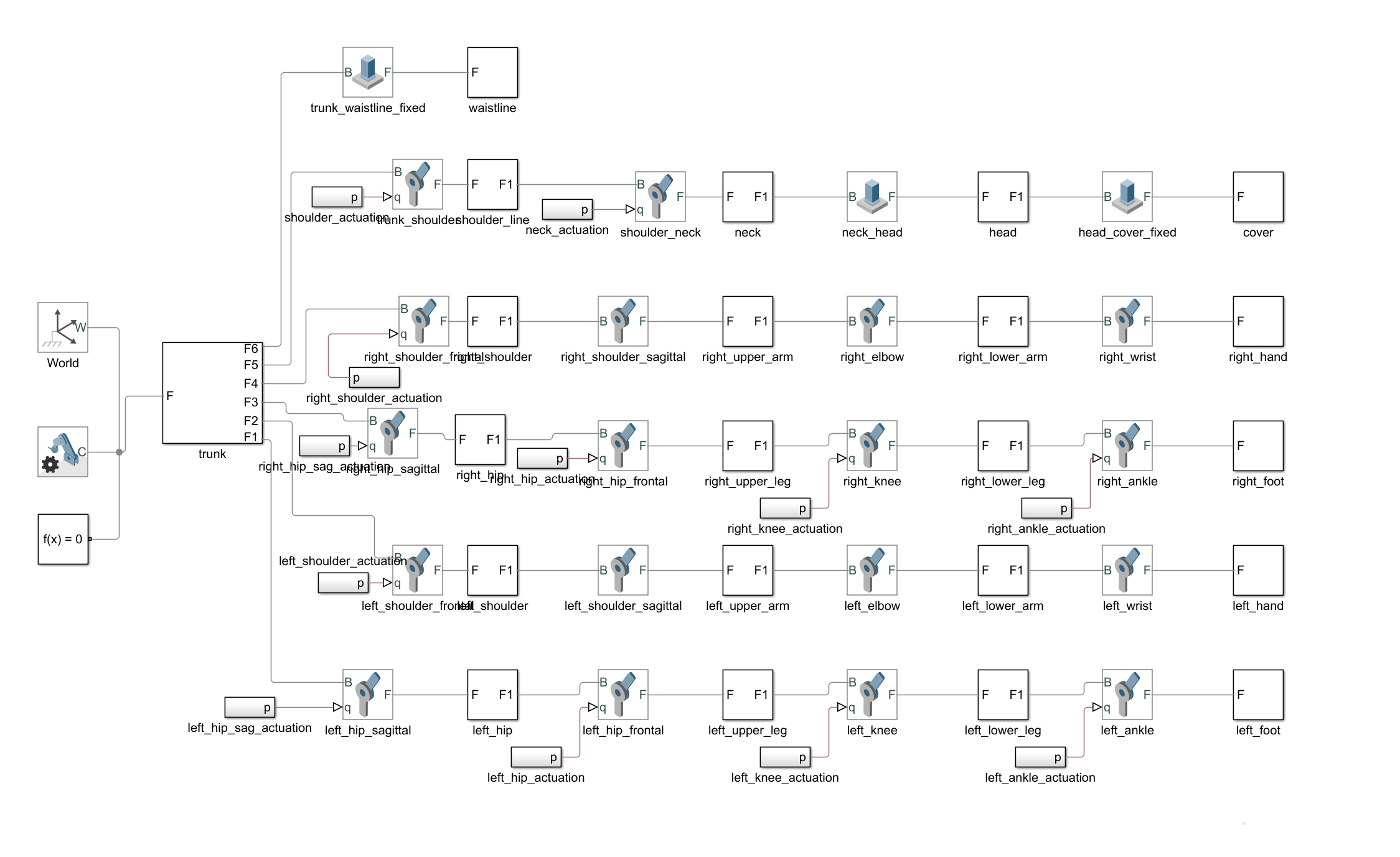
图3 双足机器人步态仿真模型
借助步态相位分析,当左胳膊向前摆动时,右腿同一时刻向前摆动,与人体的基本运动一致,按照这个逻辑,可以得到关节转角图如图4所示
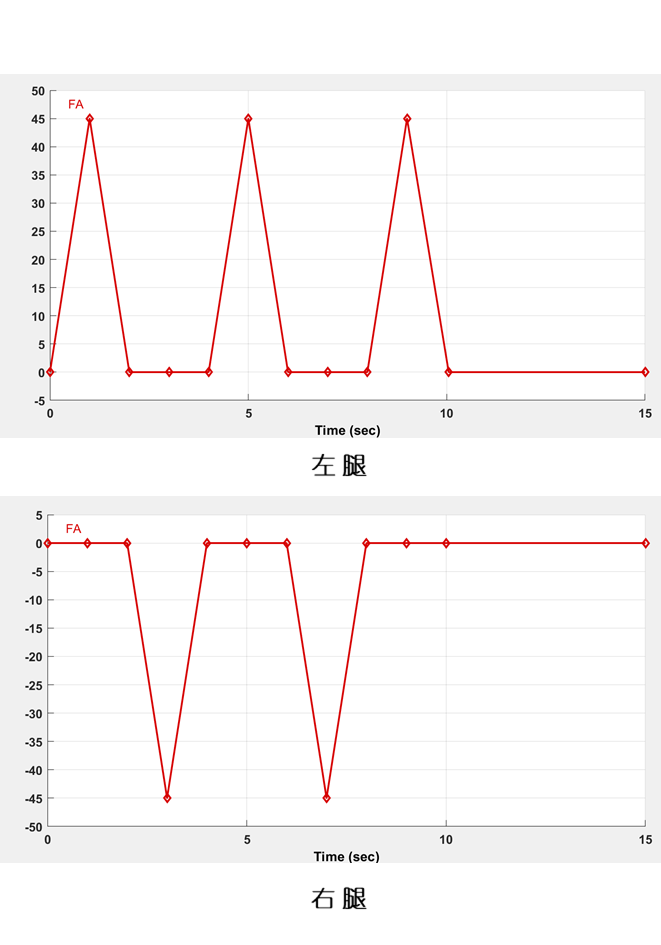
图4 双腿Hip关节转角图
修改后的机器人步态运动恢复了正常。
按照这个实例,可以自行建立六足机器人的步态仿真模型,用来模拟机器人步态的肢体摆动动作。首先需要建模。
对足式机器人建模通常选用三种方式:
一种是在外部的三维建模软件中建立模型,然后通过《MATLAB官方下载Multibody》下载对应版本的Multibody插件,按照《官方安装说明》进行安装,即可将三维软件与MATLAB链接起来,可快捷的直接从装配图中导入;
第二种方式是在外部三维软件中将每一个零部件保存为“STL”或者“STEP”格式,然后建立body模块时手动导入;
第三种方式是利用simulink的元件库自行输入参数生成模型,但这种方式仅限于常规简单形状的模型。
这里用solidworks简单建模,模型如图2所示
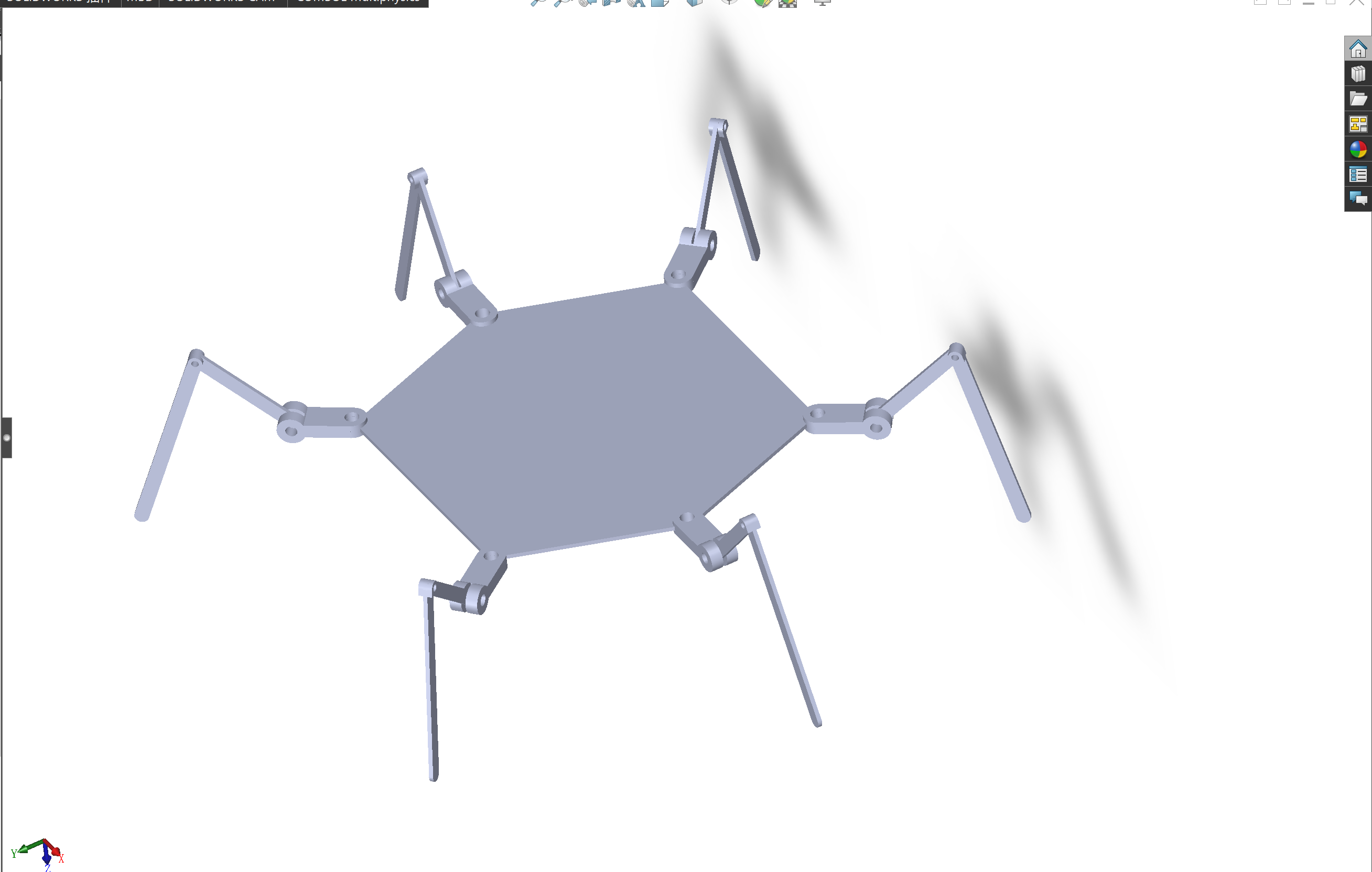
图2 六足机器人模型图
将该模型导入MATLAB中,自动生成仿真模型,需要依据逻辑,将仿真模型适当排布、修改,按照腿部关节1、2、3和方位“front ”、"middle"、“rear”、“left”和“right”分别对模块进行命名,最后形成如图3所示的仿真模块。
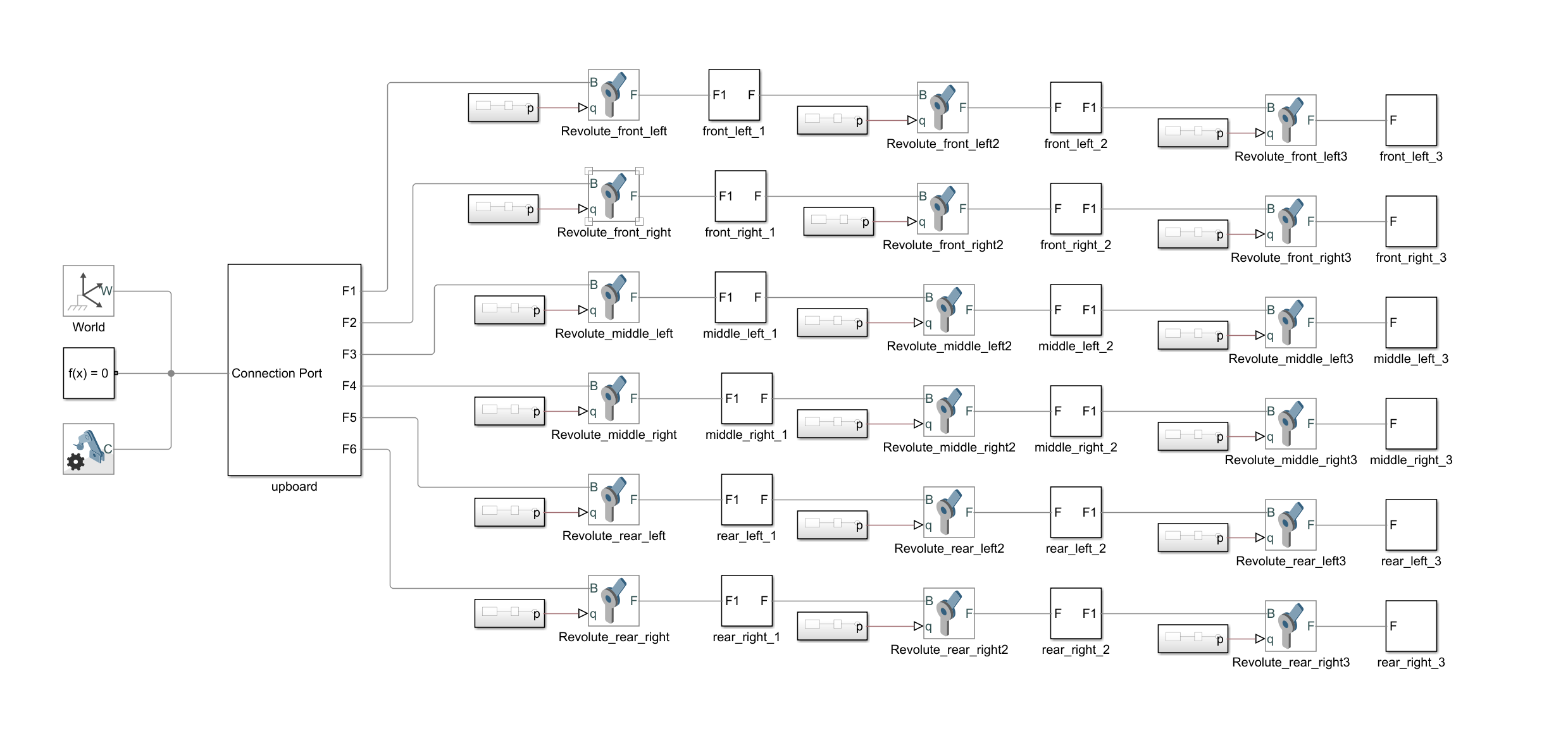
图3 六足步态仿真模型
在图3中,为了仿真步态相位,还在每一个关节处添加了运动信号,信号模块如图4所示,其中,在“motion_signal”中添加运动相位角,以达到步态仿真的目的。
图4 运动信号模块
2. 步态分析
在六足机器人中,常见的步态有三角步态、四角步态、随动步态和波导步态,每一种步态的相位如图5:
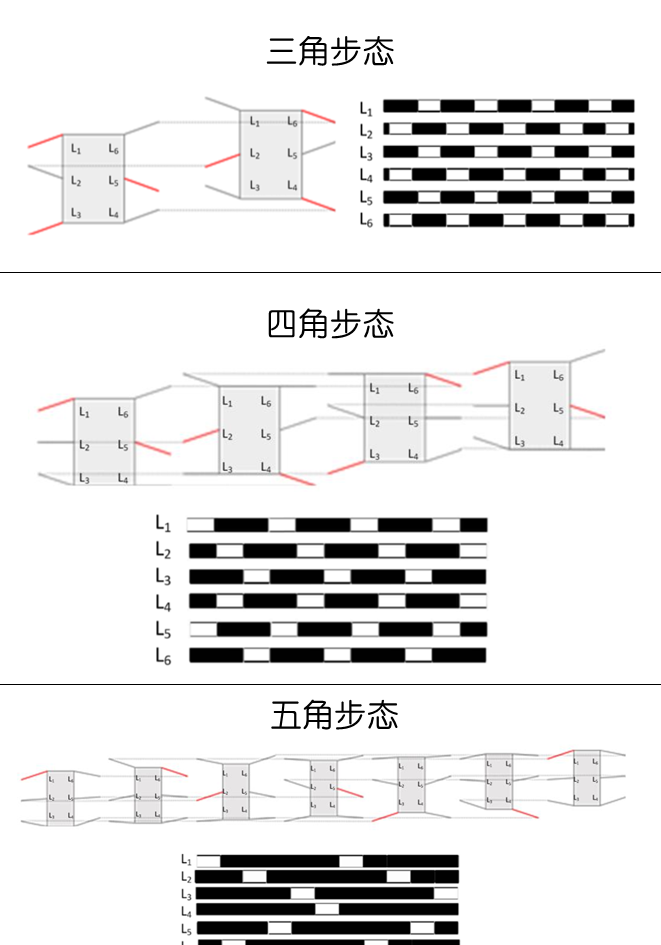
图5 常见步态相位
以三角步态的仿真为例,其余步态同理。
三角步态中,摆动相和支撑相是由关节2的抬腿和落腿动作完成,而机体的移动是由关节1和关节3的转角决定,此处只分析关节2的抬腿和落腿,并以机器人前行为例,设定关节1特定的角度。

图6 关节2转角示意图
由图中可以看到,仿真周期为7秒,仿真时间为14s,共两个周期;在t=1时,前左、中右、后左腿关节2抬起,t=3时,前左、中右、后左腿关节2落下;而其余3条腿则保持支撑相;在t=4时,前右、中左、后右腿关节2抬起,t=6时,前右、中左、后右腿关节关节2落下,其余三条腿保持支撑相。
按照这样的步态相位,配合关节1和关节3的转角,机器人可在平整路面完成自由行走,仿真动图如下:
[1] Song S M, Waldron K J. Machines That Walk: The Adaptive Suspension Vehicle[M].The MIT Press, 1989.




评论(1)
您还未登录,请登录后发表或查看评论