

其实说方法论夸张了,
前面四部分的内容主要是从两个解析法和数值法两个思路出发去求解轨迹优化问题。
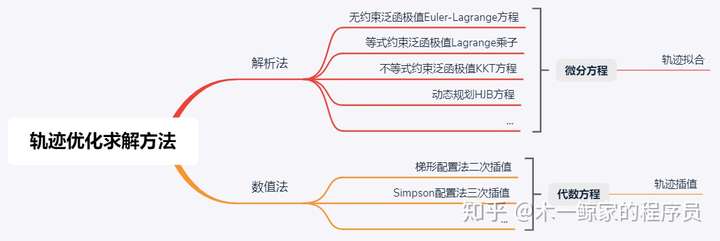
1. 解析法
解析法的思路是将问题形式化为最优控制问题,求解最优控制可以从数学角度出发(泛函分析),推导出一些结论:
(1)无约束条件泛函极值——变分法与Euler-Lagrange方程
(2)等式约束条件泛函极值——Lagrange乘子与增广泛函
(3)(不)等式泛函极值——KKT方程
(4)一般等式泛函极值与Hamilton方程
(5)动态规划——Hamilton-Jacobi-Bellman方程
这些方法(突然想到《高等动力学》里面求解动力学除了牛顿力学,不就是Lagrange力学和Hamilton力学吗?真是方法论都是一致的,只是控制对象不同)可以得到一个微分方程。(求解介绍到此为止)
优化问题(路径积分,或者说泛函极值)问题转换为一个微分方程(泛函简化为函数的方法1)
微分方程的求解,肯定又想到了特征方程(代数方程)的求解,特征方程不又联想到线性代数和矩阵分析,对了,就是向量空间(特征值和特征向量分别构成坐标与基底)
同样的,微分方程也可以构成函数空间,于是又有正交多项式,Fourier级数的概念
(笔者也很讨厌这一大堆数学理论,上面所说的都知道一个概念,也不希望给读者带来误解和负担,会用就好吧,比方说,理论上可能会讨论正交多项式的Schmidt正交化,我们就不去考虑去,就直接用简单多项式和简单三角函数)
于是,我们能想到函数拟合的方法,可以采用如下思路:
(1)多项式函数,根据约束条件和轨迹光滑程度去确定阶次(Taylor级数)
(2)三角函数,根据约束条件和轨迹光滑程度去确定频率(Fourier级数)
其实解释微分方程求解的思路很多,无论是从函数空间,级数等均可,方法虽然不同,最终目的是一致的,就是
讲最优控制(泛函极值)问题转化成一个微分方程(函数)问题,然后求解过程被称为轨迹拟合,(不够直接)所以叫间接法
2. 数值法
问题的开始还是最优控制问题,只不过数值法比解析法更直接,讲目标函数,约束,动力学均采用数值积分方法近似,有个好听的名字叫配置法,于是讲泛函问题转化为NLP(泛函简化为函数的方法2)
数值积分的方法中最重要的应该是插值型积分,所采用的方法是插值,于是数值法的求解过程被称为轨迹插值
不考虑后续NLP问题的求解,仅考虑插值算法,可以想到:
(1)线性插值
(2)二次插值
(3)三次插值
这也形成了轨迹插值的主要方法
3. 接下来想说的话
我们知道优化问题形式化为两个方面:
(1)目标函数
(2)约束条件
其实还有(3)就是求解方法,就是本专栏01-04的内容
对于目标函数和约束条件,我们可以分为以下几个方面:
(1)镇定问题,跟踪问题还是调节问题?
(2)时间最优,能量最优还是混合最优?
(3)硬约束求解还是软约束求解?
(4)动力学问题?
这个专栏接下来需要记录的内容~~~



评论(0)
您还未登录,请登录后发表或查看评论