

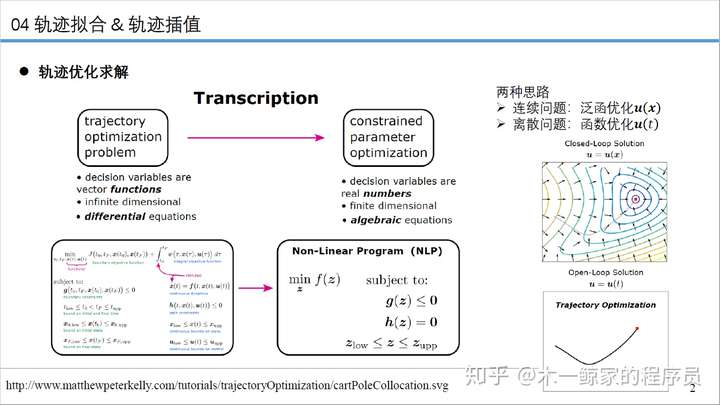
前面从两种思路讨论了轨迹优化问题的求解:
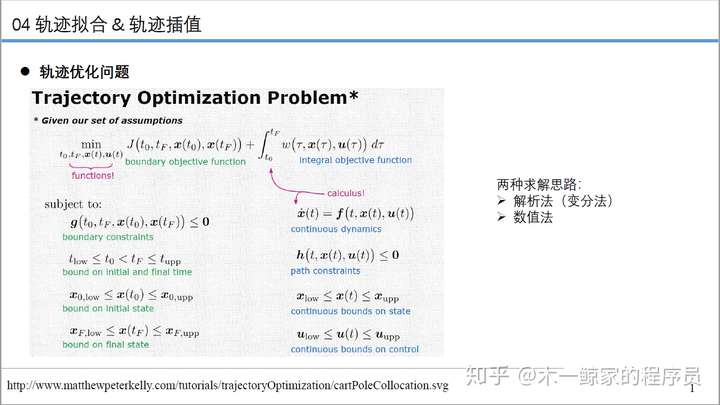
- 从解析法求解得到微分方程,进而推导出轨迹拟合问题;
- 从数值法求解得到代数方程,进而推导出轨迹插值问题。
本篇具体讨论一下两种思路的共同点与不同点
1. 轨迹拟合
这里罗列了主流的一些解析法求解的方法和结论(博主的数学比较差,实在是不想去具体讨论推导,就只列出了结论,在轨迹优化02中也只是简单考虑了无约束条件泛函极值的求解)
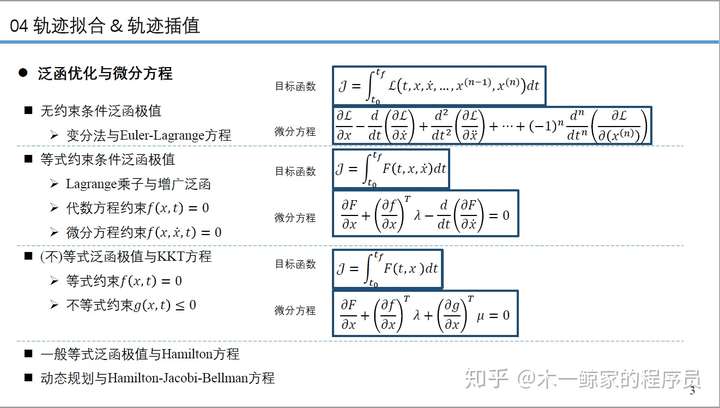
我们知道,这些结论最终都把轨迹优化问题指向了微分方程,而微分方程的求解又涉及到函数空间,函数空间中主要工具是正交多项式(这里也不去讨论正交化等细节问题),我们需要知道的是两种重要的正交函数:
(1)多项式
(2)三角函数
这也是我们为啥在轨迹规划伊始就提到了我们要用三次多项式、五次多项式、三角函数等去进行拟合

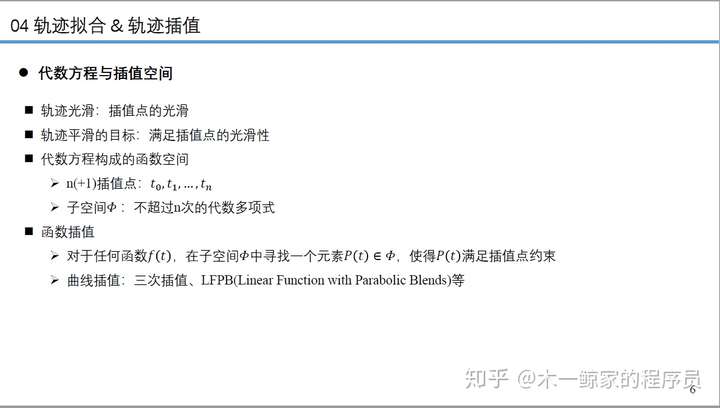
2. 轨迹插值这里罗列了两种主要的数值法求解的过程和结论:
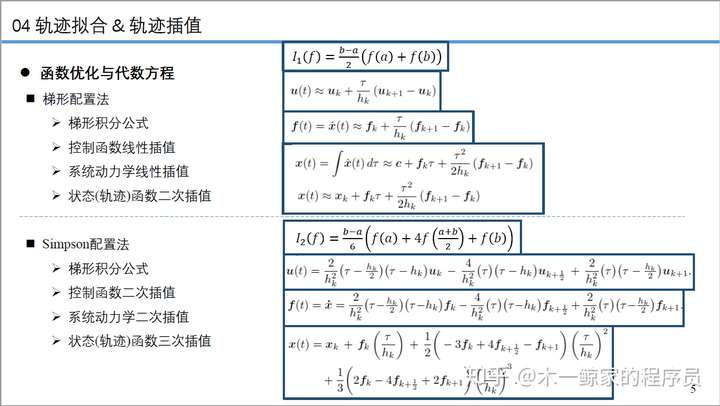
这些结论最终都把轨迹优化问题指向了代数方程,求解NLP问题,通过配置点形成了插值空间,而主要的插值方法是三次插值
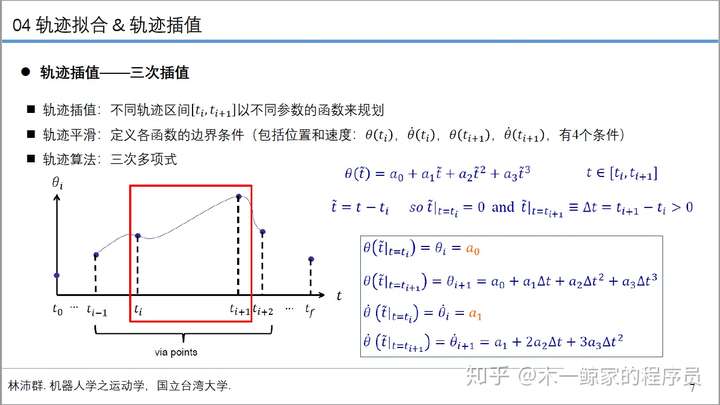
求解三次插值有两类问题:(1)中间点的速度已知,这个问题就是求解分段三次多项式
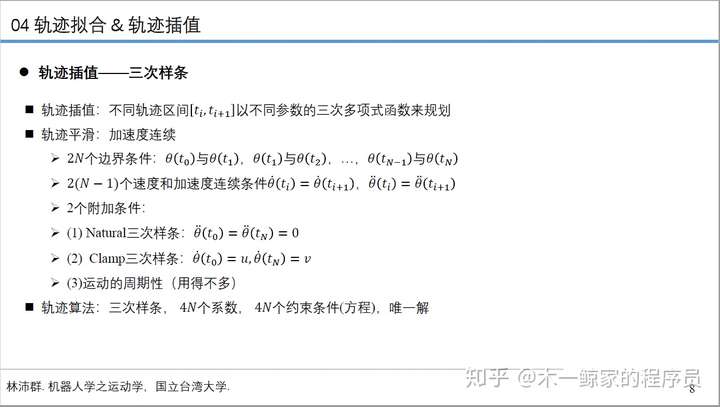
(2)中间点的速度未知,这个问题就是经典的三次样条问题
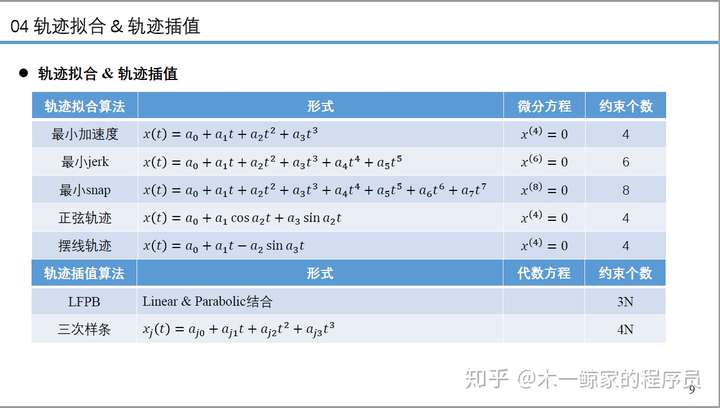
3. 轨迹拟合 & 轨迹插值 汇总
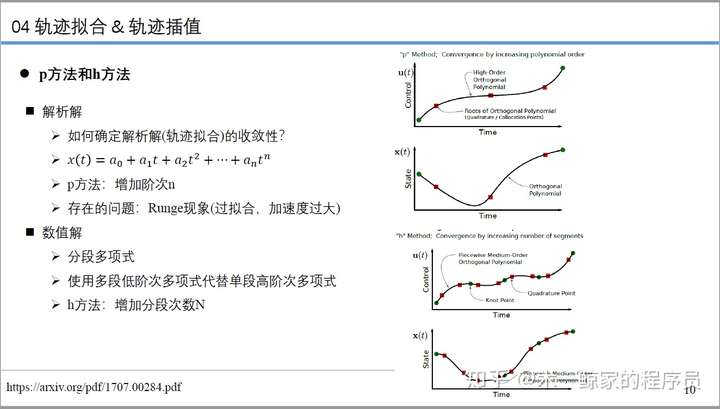
4. Runge现象
这个问题无论是机器学习(过拟合),还是说插值与拟合(Runge现象),还是说轨迹优化问题(加速度过大),其实都是一类问题:为了拟合的收敛性,必须增大拟合的阶次(p方法)
在插值中,通常采用增加分段(h方法),来降低多项式阶次,从而解决这个Runge现象
Reference
- http://www.matthewpeterkelly.com/tutorials/trajectoryOptimization/cartPoleCollocation.svg
- 林沛群. 机器人学之运动学,国立台湾大学
- https://arxiv.org/pdf/1707.00284.pdf
写在后面:
在本专栏中,很多问题我并没有讲的很明白,主要还是笔者的水平有限,希望读者见谅,写这些主要目的是给自己留个笔记的
如果有读者不明白的地方,欢迎一起交流或者带着“关键词”去寻找更系统和完备的解答



评论(0)
您还未登录,请登录后发表或查看评论