


之前相关课程笔记:
1.Review: Denavit-Hartenberg表达法(Crag Version)
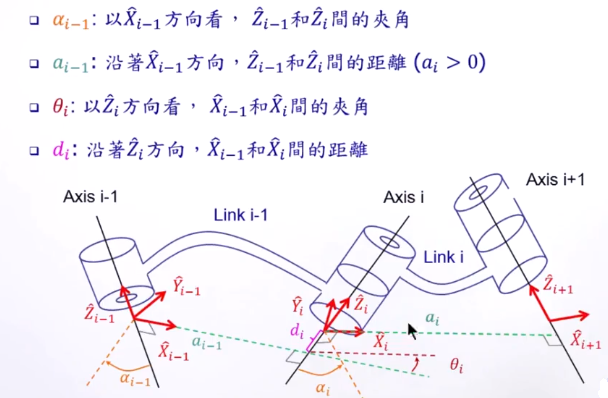
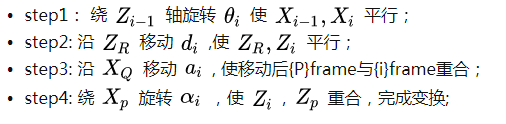
在这个操作顺序下面:
这个表达法不是那么直观,因为只有
是在第i个link下面,而
都是在第i-1个Link下面。
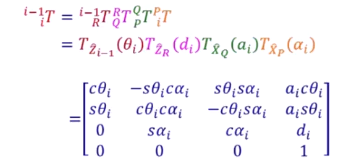
2.Denavit-Hartenberg表达法(Standard)
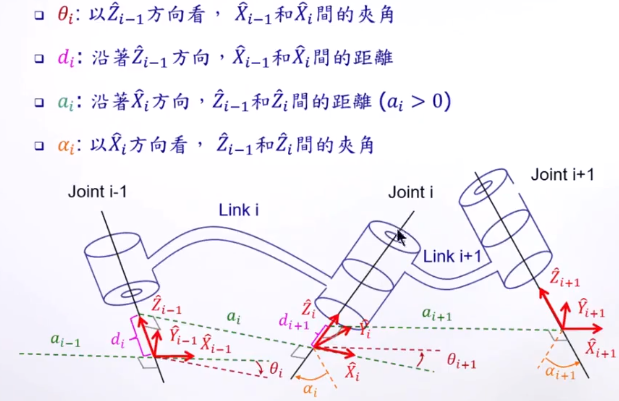
与Crag Version的几个区别: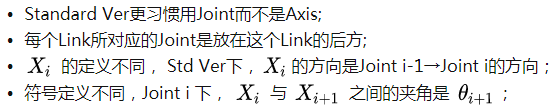
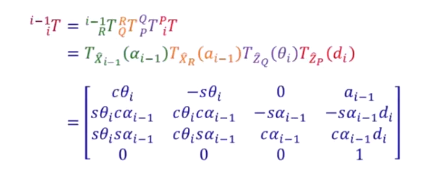
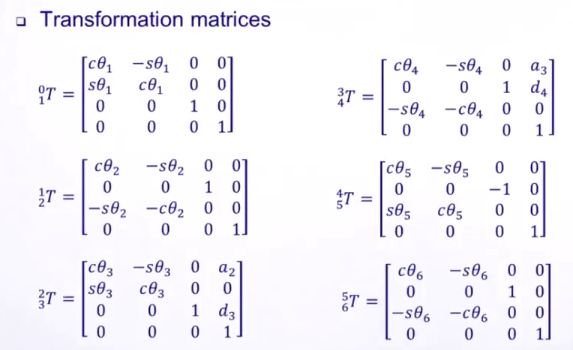
采用Std Ver的好处,在进行Trans时,其Trans Matrix求法如下:
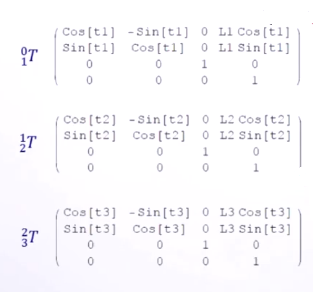
Example-1 Craig DH&Std DH方式表达差异(A RRR Manipulator)
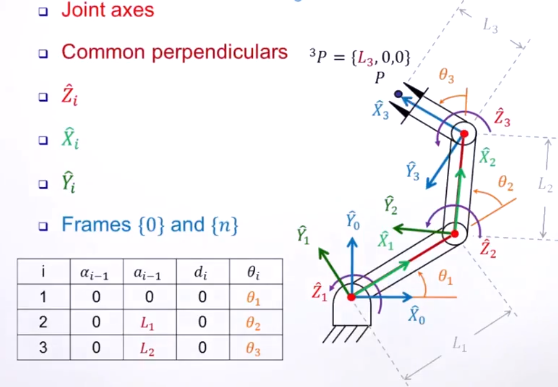
Craig DH 情况下的Transformation Matrix分别是:(θ用t代替),可以发现,Crag DH的一个优点就是关于Translation的描述会更加干净(与下面Std Ver对比)。

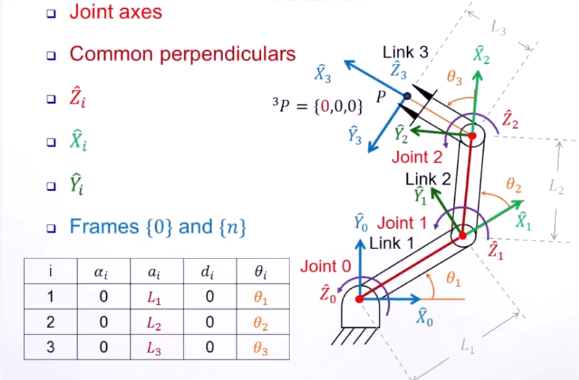
Std DH 情况下,可以发现,末端点的位置时确定的,无需额外定义,
直接跑进了DH Table中,这样更加明确清晰。但是,对于Translation的表达有些复杂。
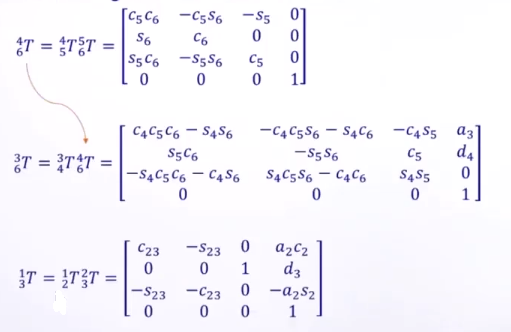
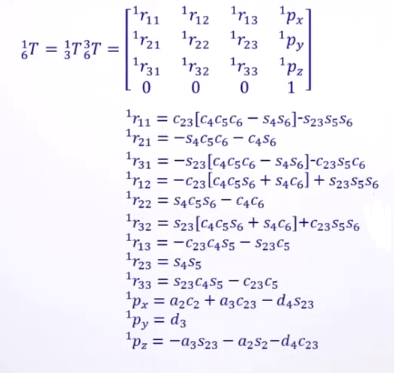
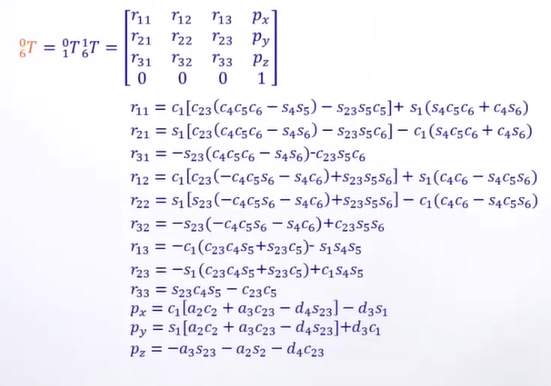
现在把Trans Matrix乘开,进行进一步地分析



可以发现,因为是取Link3相对于地的Trans Matrix,所以其旋转坐标部分一模一样;
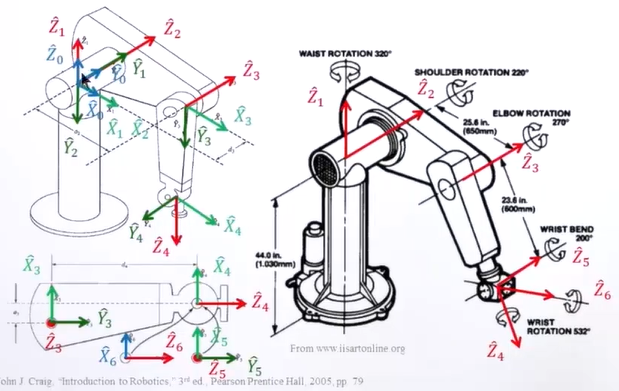
CLASSICAL EXAMPLE: PUMA 560
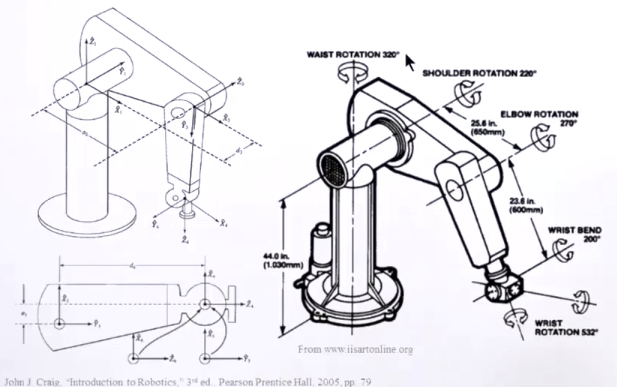
- Craig 法: 先找Axis→Z→X(
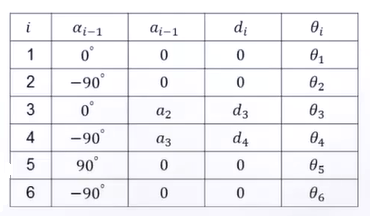
相交, X 选择和两者都垂直的方向)→Y→补上frame{0}与frame{n}→确定几何关系→目视法确定Craig DH Table:


评论(0)
您还未登录,请登录后发表或查看评论