

此文系第16届智能车智能视觉组-上海交通大学AuTop战队开源算法讲解第十一部分--激光打靶,专栏及开源方案链接:
llo:第16届智能车智能视觉组-上海交通大学AuTop战队开源汇总
最近有些小伙伴在问我激光打靶时,如何计算舵机的转角。所以特此补充一篇文章来进行介绍。
注:该篇文章需要一定程度的相机成像模型和坐标变换的知识,如果有机器人学的基础知识会更好。
一、坐标系定义
一个常规的二自由度舵机云台如下图所示
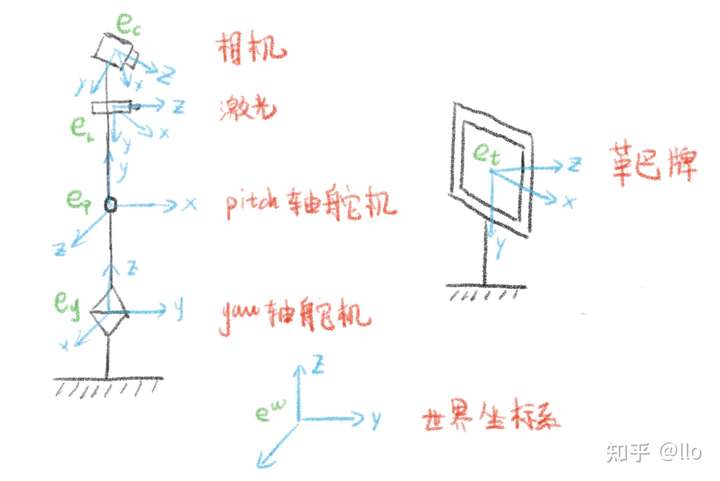
在上图中,我们将世界坐标系称为
(w: world)、yaw轴舵机坐标系称为
(y: yaw)、pitch轴舵机坐标系称为
(p: pitch)、激光坐标系称为
(l: laser)、相机坐标系称为
(c: camera)、靶牌坐标系称为
(t: target)。
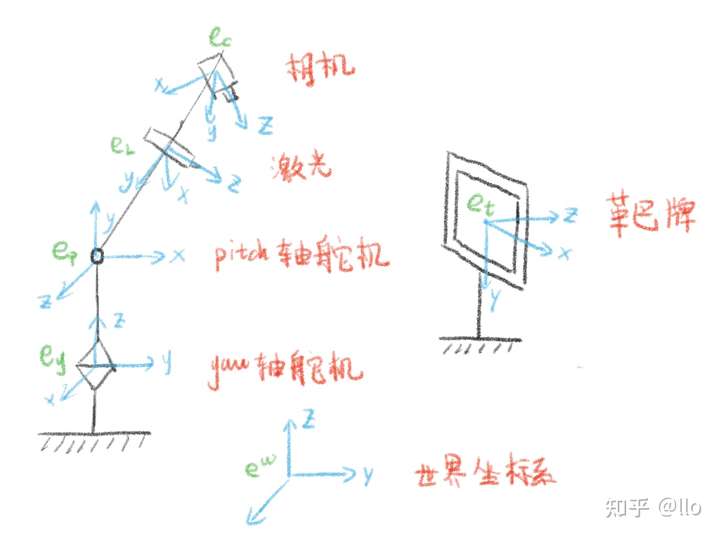
同时,当舵机发生旋转时,舵机坐标系本身不会跟着旋转。以pitch轴舵机为例,当pitch轴舵机低头后,对应的坐标系如下图所示

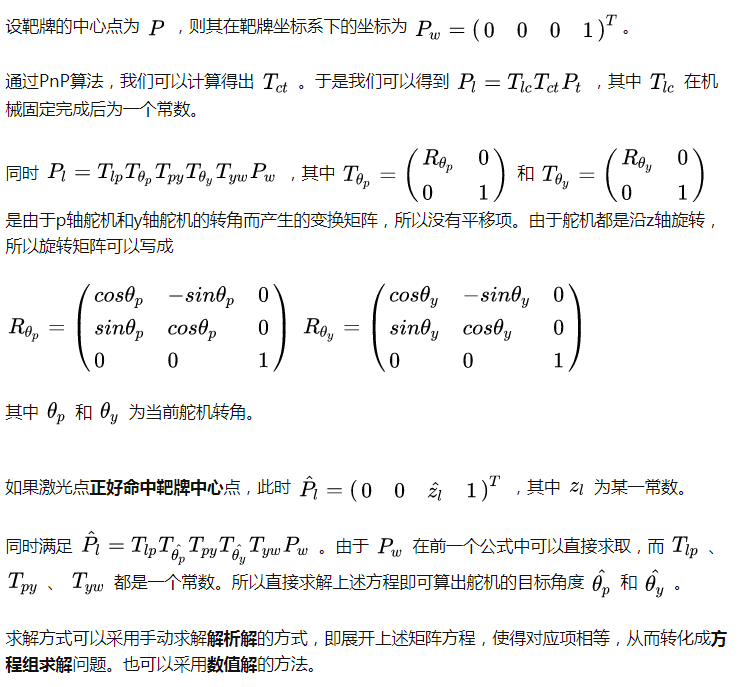
二、模型建立
三、参数标定

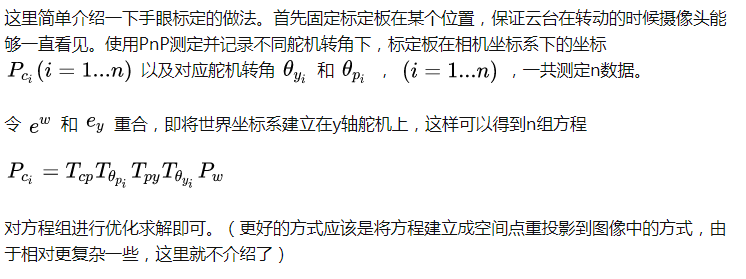
3.1 手眼标定
3.2 相机-激光标定
即标定
。标定的关键在于建立方程,有了方程只需要进行优化求解即可。为此,我们采用以下方法:
- 保持激光开启且激光点投射在标定板上,小幅度移动标定板并拍摄若干张照片。

2. 对上述图片进行去畸变操作
3. 识别(或手动选取)激光点在图片中的位置
4. 根据PnP计算得到标定板坐标系和相机坐标系之间的变换关系(
)
5. 根据激光点和标定板角点之间的关系,使用透视变换计算出激光点 P 在标定板坐标系下的坐标
6. 得到方程
7. 优化求解得到
可以注意到,当激光坐标系绕z轴旋转时,上述等式同样恒成立,这意味着
的解不唯一。但这并不影响对舵机角度的计算,所以任取一个特解即可。
四、模型简化
第二节模型建立时,我们发现想要解出舵机角度,需要解一个复杂的三角方程,这个方程的解析解并不容易求取,而采用数值解则比较麻烦。所以是否可以通过巧妙的设计机械结构,从而简化舵机角度的求解。
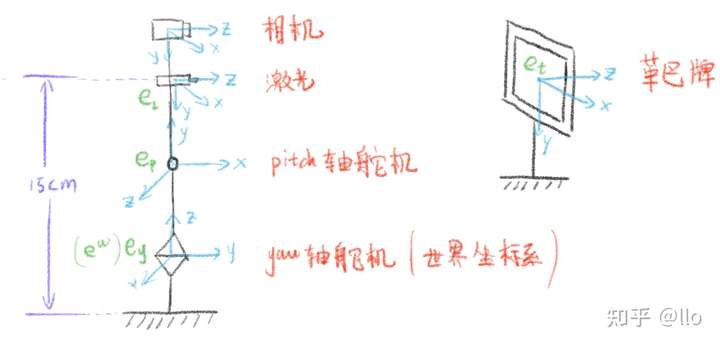
在上图中,相机、激光、p轴舵机、yaw轴舵机处于同一铅垂线,且相机、激光坐标系完全平行,同时激光离地距离正好是靶牌离地的距离(15cm)。
此时打靶时可以保持p轴舵机不动,仅需移动y轴舵机即可,并且y轴舵机转角的计算完全不需要进行坐标系间的标定,同时也不需要求解PnP,只需要标定相机内参,使用小孔成像模型求反正切即可得到y轴舵机转角。
假设相机内参矩阵为(忽略畸变,如果有畸变需要首先去畸变)
靶牌中心点在图像上的坐标为
,则y轴舵机转角为
这个方法可以说是最简单的打靶方式,我们也同样使用了这个方案,但需要一定程度的机械安装精度保证。
SJTU-AuTop完整开源方案链接,如果觉得我们的方案对您有帮助,请在github上帮忙点个star吧:)



评论(0)
您还未登录,请登录后发表或查看评论