

前边我们学习了如何在ROS2中创建一个tf2的静态广播器,机器人系统中还有很多位姿关系会变化的坐标系,这就需要我们在代码中动态广播坐标系的变换,本篇我们就来学习如何使用C++编写一个动态的广播器。
一、编写广播器节点
继续使用之前创建的learning_tf2_py功能包,在src文件夹中创建今天需要用到的代码文件turtle_tf2_broadcaster.py,然后复制粘贴如下代码:
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
import tf_transformations
from turtlesim.msg import Pose
class FramePublisher(Node):
def __init__(self):
super().__init__('turtle_tf2_frame_publisher')
# Declare and acquire `turtlename` parameter
self.declare_parameter('turtlename', 'turtle')
self.turtlename = self.get_parameter(
'turtlename').get_parameter_value().string_value
# Initialize the transform broadcaster
self.br = TransformBroadcaster(self)
# Subscribe to a turtle{1}{2}/pose topic and call handle_turtle_pose
# callback function on each message
self.subscription = self.create_subscription(
Pose,
f'/{self.turtlename}/pose',
self.handle_turtle_pose,
1)
self.subscription
def handle_turtle_pose(self, msg):
t = TransformStamped()
# Read message content and assign it to
# corresponding tf variables
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'world'
t.child_frame_id = self.turtlename
# Turtle only exists in 2D, thus we get x and y translation
# coordinates from the message and set the z coordinate to 0
t.transform.translation.x = msg.x
t.transform.translation.y = msg.y
t.transform.translation.z = 0.0
# For the same reason, turtle can only rotate around one axis
# and this why we set rotation in x and y to 0 and obtain
# rotation in z axis from the message
q = tf_transformations.quaternion_from_euler(0, 0, msg.theta)
t.transform.rotation.x = q[0]
t.transform.rotation.y = q[1]
t.transform.rotation.z = q[2]
t.transform.rotation.w = q[3]
# Send the transformation
self.br.sendTransform(t)
def main():
rclpy.init()
node = FramePublisher()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()1.1 代码解析
我们来分析一下代码。
self.declare_parameter('turtlename', 'turtle')
self.turtlename = self.get_parameter(
'turtlename').get_parameter_value().string_value在FramePublisher类的初始化函数中,首先声明了一个参数“turtlename”,并动态获取该参数的值,表示海龟的名字,比如turtle1或者turtle2。
self .subscription = self.create_subscription(
Pose,
f'/{self.turtlename}/pose',
self.handle_turtle_pose,
1)接下来订阅话题turtleX/pose,并且绑定回调函数handle_turtle_pose。
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'world'
t.child_frame_id = self.turtlename紧接着创建一个tf消息TransformStamped,并且进行赋值:
(1)时间戳:使用当前时间,this->get_clock()->now()
(2)父坐标系:这里是world
(3)子坐标系:这里使用海龟的名字作为子坐标系
后续的回调函数中,就会不断更新word与turtleX坐标系之间的位姿关系了。
# Turtle only exists in 2D, thus we get x and y translation
# coordinates from the message and set the z coordinate to 0
t.transform.translation.x = msg.x
t.transform.translation.y = msg.y
t.transform.translation.z = 0.0
# For the same reason, turtle can only rotate around one axis
# and this why we set rotation in x and y to 0 and obtain
# rotation in z axis from the message
q = tf_transformations.quaternion_from_euler(0, 0, msg.theta)
t.transform.rotation.x = q[0]
t.transform.rotation.y = q[1]
t.transform.rotation.z = q[2]
t.transform.rotation.w = q[3]这里我们将海龟的坐标和朝向变换成坐标系的位姿变换。
# Send the transformation
self.br.sendTransform(t)最后也是最重要的一步,广播tf,让其他节点都可以知道更新后的坐标系关系。
1.2 添加依赖项
打开功能包的package.xml文件,添加以下依赖项:
<exec_depend>launch</exec_depend>
<exec_depend>launch_ros</exec_depend>1.3 添加程序入口
打开功能包的setup.py文件,添加如下程序入口:
'console_scripts': [
'turtle_tf2_broadcaster = learning_tf2_py.turtle_tf2_broadcaster:main',
],二、编写启动文件
由于节点较多,这里我们来编写一个Launch文件,在功能包中创建launch文件夹,并在其中创建turtle_tf2_demo.launch.py,内容如下:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='turtlesim',
executable='turtlesim_node',
name='sim'
),
Node(
package='learning_tf2_py',
executable='turtle_tf2_broadcaster',
name='broadcaster1',
parameters=[
{'turtlename': 'turtle1'}
]
),
])在这个Launch文件中,我们启动了来你两个节点,一个是turtlesim_node海龟仿真器节点,另一个是刚刚完成的turtle_tf2_broadcaster节点,所以可以猜测到后者将根据前者发布的pose话题,更新tf中海龟坐标系与世界坐标系之间的位姿关系。
2.1 更新setup.py
打开功能包的setup.py文件,更新如下Launch文件路径的内容:
import os
from glob import glob
....
data_files=[
...
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*.launch.py'))),
],三、编译与运行
在编译之前,首先确定所有依赖项正常安装:
rosdep install -i --from-path src --rosdistro foxy -y然后编译工作空间。
colcon build --packages-select learning_tf2_py接下来就可以运行Launch文件了。
. install/setup.bash
ros2 launch learning_tf2_cpp turtle_tf2_demo.launch.py运行成功后,再新打开一个终端,并且启动键盘控制节点:
ros2 run turtlesim turtle_teleop_key此时就可以通过键盘控制小海龟运动了。
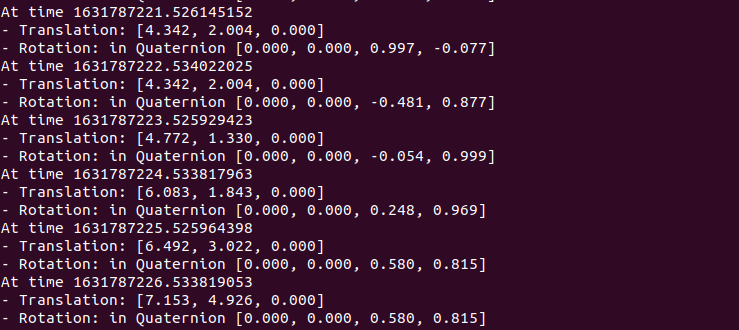
再启动一个终端,通过tf2_echo检查tf是否正常广播了。
ros2 run tf2_ros tf2_echo world turtle1终端中会不断刷新两个坐标系之间的位姿关系,控制海龟运动时,也可以看到数据在不断刷新。
好啦,本篇我们就学习了如何通过tf2的广播器,广播任意两个坐标系之间的位姿关系。

评论(1)
您还未登录,请登录后发表或查看评论