
机器人手臂的简单移动
1. 整体思路
2. 代码解析
2.1 代码分步
2.1.1 库
2.1.2 连接物理模拟
2.1.3 重力设置
2.1.4 模型加载(一)
2.1.5 设置基础参数(一)
2.1.6 模型加载(二)
2.1.7 设置基础参数(二)
2.1.8 移动开始
2.1.9 程序结束
2.2 代码总体
3. 效果展示
4. 总结
申明:本人今年博一(地点英国),项目是与机器人有关的内容。承接上文,mini-project(由于这周要做另一个mini-project2,所以现在才完成系列文章)。
系列文章目录:
上一篇:
PyBullet (一) 在Ubuntu20.04.1中安装PyBullet(VMware Workstation 16.x Pro)
下一篇:
PyBullet (三) 将圆柱体看作机器人的加速和减速运动机
虚拟机:VMware Workstation 16.x Pro
系统:Ubuntu20.04.1(官方下载链接)
PyBullet:(官方链接)(官方指南)
1. 整体思路
首先要创建整个机器人运行的环境。由于环境是自己创建的,所以知道环境中所有物体的位置。知道物体位置之后设定目标点,然后将目标点传入机器人手臂中。接着机器人手臂就可以朝着目标点移动了。
2. 代码解析
2.1 代码分步
2.1.1 库
import pybullet as p
import time
import pybullet_data
import numpy as np
最基础的导入包啊,库啊
2.1.2 连接物理模拟
physicsClient = p.connect(p.GUI)#or p.DIRECT for non-graphical version,"连接 "物理模拟。
p.setAdditionalSearchPath(pybullet_data.getDataPath()) #optionally
导入PyBullet模块后,首先要做的是 "连接 "物理模拟。PyBullet是围绕客户端-服务器驱动的API设计的,客户端发送命令,物理服务器返回状态。PyBullet有一些内置的物理服务器。DIRECT和GUI。GUI和DIRECT连接都会在与PyBullet相同的过程中执行物理模拟和渲染。
2.1.3 重力设置
p.setGravity(0,0,-9.81)
设置重力系数分别是:x方向(+:x轴正半轴;-:x轴负半轴);y方向(+:y轴正半轴;-:y轴负半轴);z方向(+:z轴正半轴;-:z轴负半轴)。
2.1.4 模型加载(一)
planeId = p.loadURDF("plane.urdf")
robotId = p.loadSDF("/home/xzs/PyBullet_Practice/bullet3-master/data/kuka_iiwa/kuka_with_gripper.sdf")
a.加载平面环境
plane.urdf中的内容:
<?xml version="1.0" ?>
<robot name="plane">
<link name="planeLink">
<contact>
<lateral_friction value="1"/>
</contact>
<inertial>
<origin rpy="0 0 0" xyz="0 0 0"/>
<mass value=".0"/>
<inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="plane.obj" scale="1 1 1"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 -5"/>
<geometry>
<box size="30 30 10"/>
</geometry>
</collision>
</link>
</robot>
b.加载机器人
kuka_with_gripper.sdf中的内容:
(由于太长可以自行到GitHub上下载:下载链接)
有很多不同的加载模型的代码:loadURDF, loadSDF, loadMJCF
loadURDF


loadURDF返回一个主体唯一id,一个非负的整数值。如果URDF文件不能被加载,这个整数将是负值,而不是有效的主体唯一id。
loadSDF, loadMJCF

一般返回的列表的第一个元素是加载对象的唯一ID
2.1.5 设置基础参数(一)
robotStartPos = [0,0,0]#机器人的初始位置
cylinderStartPos = [1,0,0.3]#圆柱体的初始位置(在环境中我将一个圆柱体设置为平台(一个台子而已,可以是任何东西))
boxStartPos = [1,0,0.6 + 0.05 + 0.01]#箱子的基础位置(我在台子上放了一个箱子当作目标,为以后机器人的抓取做准备)
robotStartOrientation = p.getQuaternionFromEuler([0,0,0])#(机器人)会转换成一个四元数,可以理解成能够控制模型在空间中绕x,y,z轴旋转的参数。(参数是角度。e.g. [3.14,0,0] == [pai,0,0];[1.57,0,0] == [pai/2,0,0]。参数的正负表示旋转的不同方向。)
cylinderStartOrientation = p.getQuaternionFromEuler([0,0,0])#(圆柱体)同上
boxStartOrientation = p.getQuaternionFromEuler([0,0,0])#(箱子)同上
p.resetBasePositionAndOrientation(robotId[0],robotStartPos,robotStartOrientation)#按照以上的参数重新设置机器人的位置。

2.1.6 模型加载(二)
cylinderId = p.loadURDF("/home/xzs/PyBullet_Practice/bullet3-master/data/cylinder1.urdf",cylinderStartPos,cylinderStartOrientation)
boxId = p.loadURDF("/home/xzs/PyBullet_Practice/bullet3-master/data/cube1.urdf",boxStartPos,boxStartOrientation)
cylinder1.urdf:
<?xml version="1.0"?>
<robot name="myfirst">
<material name="blue">
<color rgba="0 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
<collision>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
</robot>
cube1.urdf:
<?xml version="1.0"?>
<robot name="myfirst">
<material name="blue">
<color rgba="0 0 1 1"/>
</material>
<link name="right_leg">
<visual>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
<material name="blue"/>
</visual>
<collision>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
</robot>
2.1.7 设置基础参数(二)
robot7StartPos = [0,0,1.2]#机器人第7个结点的初始位置
robotEndPos = [0.75,0,0.625]#机器人第7个结点的结束位置
robotEndOrientation = p.getQuaternionFromEuler([1.57,0,1.57])#同上
startPos_array = np.array(robot7StartPos)#将参数转换成array然后才能进行“+,-,*,/”运算
endPos_array = np.array(robotEndPos)#同上
stepNum = 5#我将移动过程分成了5步
step_array = (endPos_array - startPos_array)/stepNum#每一步走的长度(其实就是每一步x,y,z坐标的变化量)
2.1.8 移动开始
for j in range(stepNum):#循环次数
print(j,"step")
robotStepPos = list(step_array + startPos_array)#转换回list
targetPositionsJoints = p.calculateInverseKinematics(robotId[0],7,robotStepPos,targetOrientation = robotEndOrientation)#计算IK的解决方案(个人理解)(下面会具体介绍参数)
p.setJointMotorControlArray(robotId[0],range(11),p.POSITION_CONTROL,targetPositions = targetPositionsJoints)#执行方案(下面会具体介绍参数)
for i in range (100):#移动时间
p.stepSimulation()#这个是一定要写的,每次移动都要调用这个方法
time.sleep(1./10.)
print("i:",i)
print("------------------------------------------------------------------------------")
startPos_array = np.array(robotStepPos)#因为移动过了,所以更新一下坐标
calculateInverseKinematics


setJointMotorControlArray
可以为所有的输入传递数组,而不是为每个关节进行单独的调用,以极大地减少调用开销。
setJointMotorControlArray的参数与setJointMotorControl2相同,只是用整数列表代替了整数。

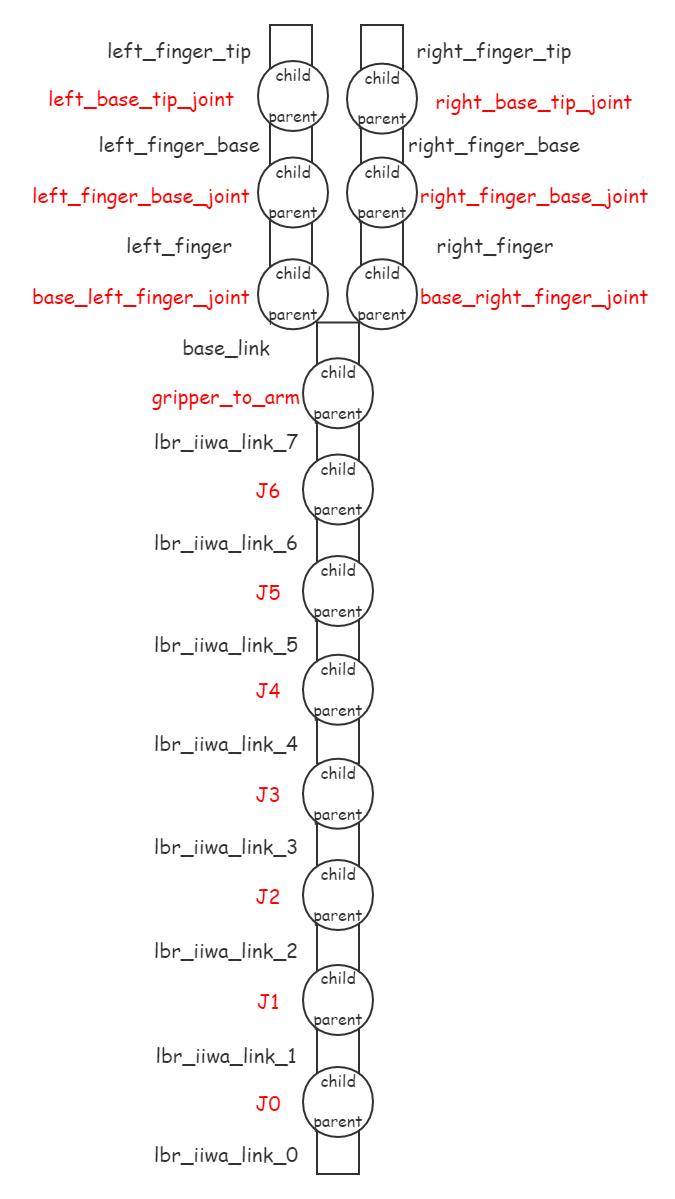
有一点是需要注意的是在我这种情况下调用"p.calculateInverseKinematics"之后得到一个长度为十一的列表,所以在接下来调用"p.setJointMotorControlArray"的时候,里面的参数"jointIndices = range(11)“是"11”,虽然整个机器人有14个结点,但是这里需要11个。
2.1.9 程序结束
p.disconnect()#有连接就有断开
2.2 代码总体
import pybullet as p
import time
import pybullet_data
import numpy as np
physicsClient = p.connect(p.GUI)#or p.DIRECT for non-graphical version
p.setAdditionalSearchPath(pybullet_data.getDataPath()) #optionally
p.setGravity(0,0,-9.81)
planeId = p.loadURDF("plane.urdf")
robotId = p.loadSDF("/home/xzs/PyBullet_Practice/bullet3-master/data/kuka_iiwa/kuka_with_gripper.sdf")
robotStartPos = [0,0,0]
cylinderStartPos = [1,0,0.3]
boxStartPos = [1,0,0.6 + 0.05 + 0.01]
robotStartOrientation = p.getQuaternionFromEuler([0,0,0])
cylinderStartOrientation = p.getQuaternionFromEuler([0,0,0])
boxStartOrientation = p.getQuaternionFromEuler([0,0,0])
p.resetBasePositionAndOrientation(robotId[0],robotStartPos,robotStartOrientation)
cylinderId = p.loadURDF("/home/xzs/PyBullet_Practice/bullet3-master/data/cylinder1.urdf",cylinderStartPos,cylinderStartOrientation)
boxId = p.loadURDF("/home/xzs/PyBullet_Practice/bullet3-master/data/cube1.urdf",boxStartPos,boxStartOrientation)
p.getNumJoints(robotId[0])#得到机器人的节点总数
p.getJointInfo(robotId[0],7)#得到机器人结点的信息
robot7StartPos = [0,0,1.2]
robotEndPos = [0.75,0,0.625]
robotEndOrientation = p.getQuaternionFromEuler([1.57,0,1.57])
startPos_array = np.array(robot7StartPos)
endPos_array = np.array(robotEndPos)
stepNum = 5
step_array = (endPos_array - startPos_array)/stepNum
for j in range(stepNum):
print(j,"step")
robotStepPos = list(step_array + startPos_array)
targetPositionsJoints = p.calculateInverseKinematics(robotId[0],7,robotStepPos,targetOrientation = robotEndOrientation)
p.setJointMotorControlArray(robotId[0],range(11),p.POSITION_CONTROL,targetPositions = targetPositionsJoints)
for i in range (100):
p.stepSimulation()
time.sleep(1./10.)
print("i:",i)
print("------------------------------------------------------------------------------")
startPos_array = np.array(robotStepPos)
p.disconnect()
3. 效果展示
机器人结点解析图:
4. 总结
这次的mini-project也算简单,很容易就能实现,后续学习内容我一会慢慢逐一完成发布到博客里,希望大家共同进步,有问题想要讨论的尽管发在评论区。由于我是初学者,可能有好多问题我也不会,到时候大家一起讨论,共同进步!!!有以后学到的内容,我会持续更新的博客中!!!




评论(0)
您还未登录,请登录后发表或查看评论