

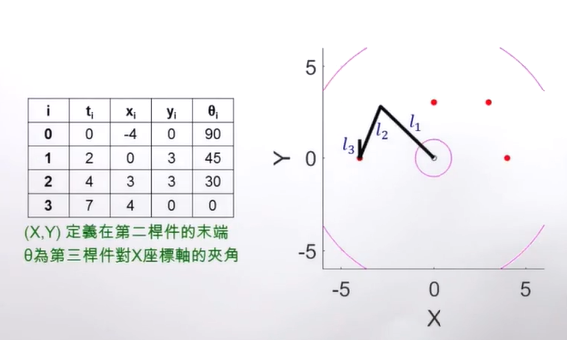
Example 1 : Revisit the RRR Manipulator
- 平面RRR手臂长度:
,
,
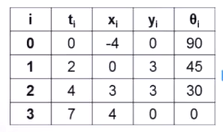
,下表定义initial,via,via和final points的位置:
第三杆对地的角度;
- 方法:以Linear Function with Parabolic Blends在Cartesian space下轨迹规划;
- 同样的例子以Cubic Polynomials的方法戳下面:
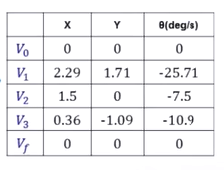
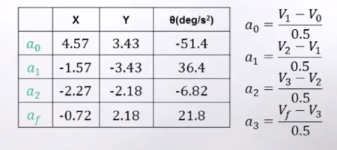
STEP1: 求出各DOF(X,Y,θ)在每段的速度及加速度(每段Parabolic Function区间长0.5s)(三个自由度分开做)。
- 注意:头尾段时间稍微内移,保证二次项是圆滑区段;
算出一路上速度与加速度值:
- 中间区段:
- 头尾区段: (时间段稍微内移,保证二次项圆滑)
我们规定好了每个二次项区间时间长度为0.5s,所以各个 DOF的加速度求法:
STEP2 :依据绝对的世界时间写出整段的方程式。建立各个DOF(X,Y,θ)在每段equation(Linear/Parabolic 共有7段)
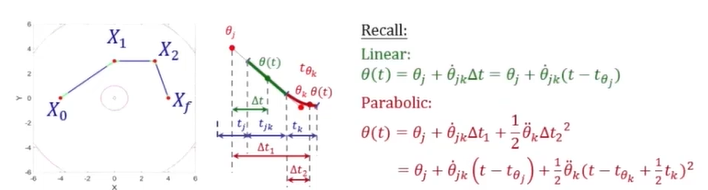
- 以X为例来看,如何把整段轨迹对地时间的equation写出。
- 第一段为parabolic,
;
- 都二段位linear,
;(一个加0.25,一个减0.25,来补偿加速段时间)
- 第三段为parabolic,
; (二次项影响是从1.75开始的)
- 所以后续也是一漾样的:

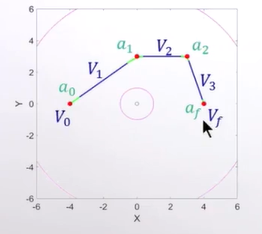
STEP3:绘制出各DOFs(X,Y,θ)之轨迹规划

STEP4:以Inverse Kinematics计算3轴的转角 (Joint Space下),将手臂参数代入Forward Kinematics,画出手臂的空间运动轨迹,以确认轨迹规划的正确性。
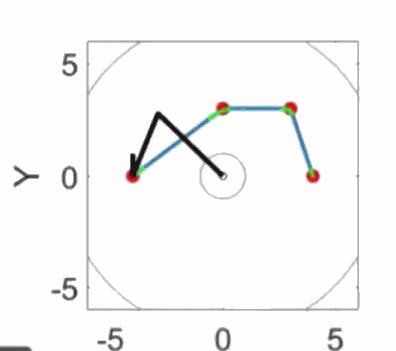
验证其正确性:
① 手臂有经过这些via points;
② 运动过程正常;


评论(0)
您还未登录,请登录后发表或查看评论