

动力学
1、动力学方程
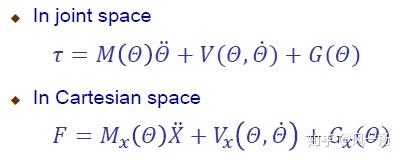
其中:在关节空间中, 分别表示关节处角度、角速度、角加速度;
表示关节力距,
为nxn的质量矩阵,
是nx1的离心力和科氏力矢量;
是nx1的重力矢量。笛卡尔空间与关节空间类似。(注,上诉动力学方程只包含了刚体力学中的那些力,并未考虑摩擦力)
在机器人工具箱中,我们有以下函数求解上诉一些相关矩阵
- R.gravload() %重力载荷
- R.inertia() %关节空间惯性矩阵
- R.coriolis() %有效载荷(作用 在末端执行器处)的耦合矩阵
- R.payload() %有效载荷(作用在末端执行器处)
例:
mdl_puma560 %调用puma560模型
q = qn %设置关节角度
qd = [0.2,0.1,0,0.1,0,0] %设置一个初始速度
G = p560.gravload(q) %重力矢量
M = p560.inertia(q) %关节空间质量矩阵
V = p560.coriolis(q,qn) %计算离心力和科氏力矢量
p560.payload(1,[0 0 0]) %添加有效载荷
M1 = p560.inertia(q) %计算添加载荷后的质量矩阵2、在搭建机器人模型是,每个连杆都有许多的动力学参数(质量、惯性距等等),我们可以利用dyn函数显示这些参数。
- R.dyn( ) %显示模型中所有连杆的动力学属性
- R.dyn( i ) %显示第i根连杆的属性参数,也相当于R.links(2).dyn
(m(关节质量),r(3*1的关节齿轮向量),I(3*3对称惯性矩阵),Jm(电机惯性),Bm(粘性摩擦),Tc(库仑摩擦),G(齿轮传动比),qlim(关节变量上下限))
mdl_puma560 %调用puma560模型
p560.dyn( ); %显示所有关节动力学参数
p560.dyn(1); %显示第一个关节属性参数
p560.links(1).dyn %显示第一个关节属性参数- R.rne(q,qd,qdd) %(角度/角速度/角加速度→力/力矩)
- R.rne(q,qd,qdd,grav,fext) %grav:重力加速度; fext=[Fx Fy Fz MxMy Mz]
- [T,q,qd]=R.fdyn(T,torqfun) %(力/力矩→角度/角速度/角加速度)
- qdd=R.accel(q,qd,torqfun) %计算角加速度
mdl_puma560 %调用puma560模型
q = qn; %设置初始关节角度
qd = [5 1 0 0 0 0]; %设置关节加速度
qdd = [0 0 0 0 0 0]; %设置关节角加速度
T = p560.rne(q,qd,qdd,[0 0 0]) %求解逆向动力学
torqfun=[1 2 3 4 5 6]; %设置初始力矩
p560=p560.nofriction( ); %没有摩擦的动力学模型
[T,q,qd]=p560.fdyn(1,torqfun); %求解正向动力学
for kk=1:65
qdd(kk,:)=p560.accel(q(kk,:),qd(kk,:),torqfun); %求解角加速度
end")


评论(0)
您还未登录,请登录后发表或查看评论