

在之前的设计指导下,机架设计首先依赖于你选择哪款电机,电机尺寸决定了你单腿足的尺寸,并最终决定机器人的机架大小和相关电气设备的安装,另外由于我们的驱动器采用ODrive没法像Minitaur一样放置于电机背面因此将有很大一部分空间被驱动器占用,综上Moco-ML机器人的机架设计主要具有如下几个特点:
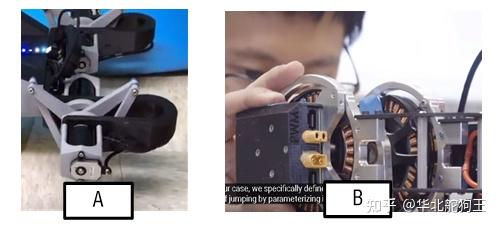
(1)采用同轴直驱电机设计:为保证电机同轴,而且采用直驱降低机构复杂度,机架设计采用电机面对面的方式实现,因此需要为两个电机设计相应的固定机臂,这里推荐两种方案,第一种是一体成型即采用如3D打印的方式制作一个能同时安装两个电机的结构件;第二种设计采用国外大学的方案即采用多层结构与框架组合的方式,考虑相关成本这里选择前者;
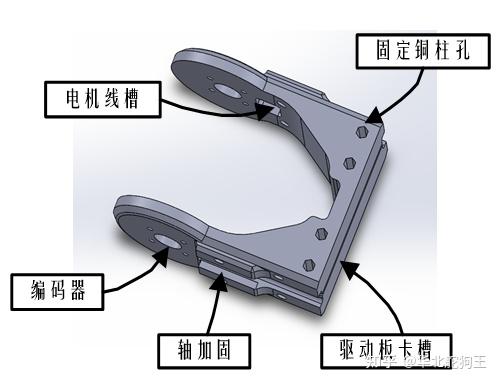
最终的机臂如下图所示,其中几个关键点如下首先以电机安装孔设计编码器安装位置,为保证一条轴壁的牢固在中间部分增加固,留下的驱动器板的卡槽后续驱动器板可以直接快速插入,对于机臂和机架板的固定这里采用在预留3M铜柱孔,之后以螺丝上下固定的方式实现。
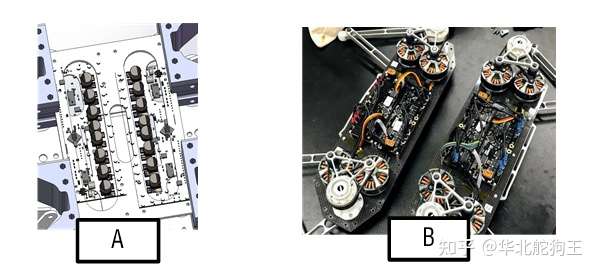
(2)采用一块主机架来支持4块驱动板:由于一个ODrive可以带动2个电机,即完成一条腿的驱动,因此考虑后续供配电方便将所有ODrive固定在一个结构上,同时该结构也作为主机架支持的一部分,当然也可以采用Doggo将驱动器布置于机器人侧机架挡板上的方案;
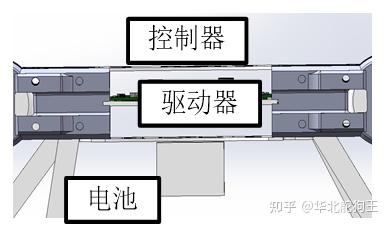
(3)对于电子器件来说采用三层夹板的方案,最上层布置控制器、感知处理器和其他设备,中层布置驱动器并走线,底层布置电池和支持起落架;
(4)最后注意一些比例问题,参考Minitaur的比例以小腿尺寸100mm为参考比例的化,大小腿尺寸比例为1:2,长宽比例为1.42:1,另外可以考虑采用其外扩5°的设计来提高横滚轴的控制性能;

综上,由于8自由度并联腿设计相对较为简单,相比Doggo采用的同轴和同步带减速确实没太多创新,不过结构简单、部件少、成本低,安装设计需求整机尺寸选个比Minitaur小一半,但受限于电机尺寸长宽比例无法保证,最终渲染的机架效果图如下:
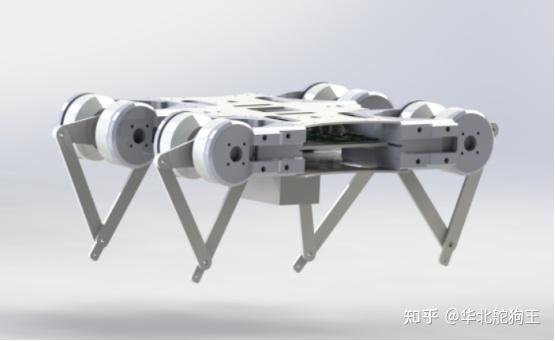


则Moco-ML机器人相关基本参数和计划采用的加工材料如下:
| 机构部件 | 参数 | 加工材料 |
| 大腿 | 55mm | 碳板3mm*8 |
| 小腿 | 110mm | 碳板3mm*8 |
| 上机架板 | 碳板2mm | |
| 驱动板 | 碳板2mm | |
| 下机架板 | 碳板2mm | |
| 单腿机臂 | 3D打印*4 | |
| 整机长度 | 270mm | 长宽比1.92:1 |
| 整机宽度 | 137mm | 长宽比1.92:1 |
| 预估重量 | 2Kg |
V1版本测试机架SW文件在Github项目地址中:


评论(0)
您还未登录,请登录后发表或查看评论