

经过8篇知乎教程,我已经为大家介绍了如何自制一个最简单的8自由度并联机器人底盘,其基于无刷电机直接驱动来实现高性能力控,可以最为科研和实验平台,当然也为大家早日实现GhostRobotic那样的丰富效果提供了一个可参考的模板。教程主要介绍了如果设计和加工一个机器人,我同时提供了2版的机架设计能满足不同的需求,在驱动器方面采用ODrive能快速构建伺服电机驱动系统,同时借助其在淘宝的低成本和高成熟度,能保证后续调试的FOC控制的可靠性,针对调试我也增加了上位机和相关保护机制,使得其相比Doggo原始固件安全性和易用性大大提升,最终参考我提供的CAN协议能快速实现对力矩命令的下发。
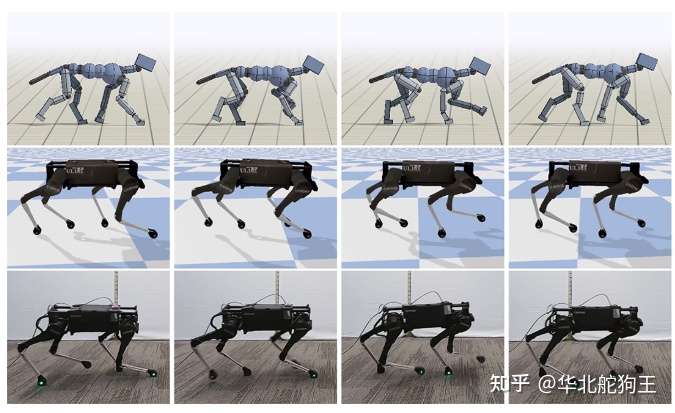
基于该平台可以编写相关步态算法,逐步地学习四足机器人简单运动学、动力学、VMC力控到MPC控制,从而掌握整个机器人的算法原理,当然最终基于该平台来实现Bound、Pace等复杂步态,另外还能实现后空翻上楼梯等特技:




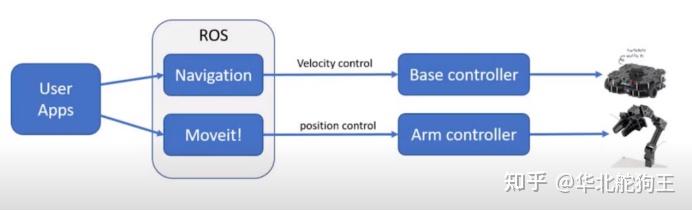
当然也可以搭载激光雷达、视觉传感器或者机械臂来实现目标抓取、自主导航、SLAM建图,并开始研究如何实现自主任务,把其真正建立为一个有价值的机器人系统。
当然也可以居于该平台来研究强化学
力控VMC站立,直驱构型
习,无论是迁移Google实现的步态学习模型还是基于强化学习实现自主避障,都是一个非常有意思的尝试,目前基于LSTM和模仿学习的方案已经是机器人自学习非常成熟的技术:

综上,这就是整个Moco-ML机器人硬件部分的教程,至于后续步态算法部分如果大家愿意赞赏支持的话会再整理!
相关机器人机架、主控PCB和原理图文件已经上传到Github中!!


评论(0)
您还未登录,请登录后发表或查看评论