

按照我们的初级进阶之路,位置搞定了,下一步该是速度了。
速度可以表示为位置的微分形式,所以对机器人的微分运动分析就可以进行速度分析。
雅可比矩阵
首先我们求速度,一般指的是机械臂端部的速度。所以对端部位姿求微分,可写为 。其中
为末端沿xyz轴的微分运动,
为末端绕xyz的微分旋转。而我们也已经知道端部位姿矩阵关于关节变量的方程,例如
对其求时间微分,等式右边对关节变量 求导,可得到
去掉dt,可得
那么,用同样的方式计算 ,可得相同形式,总结为如下
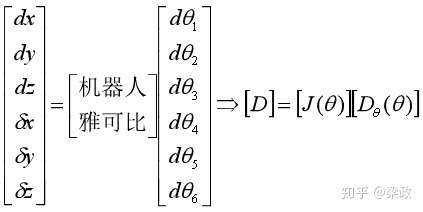
其中矩阵 为机器人的雅可比矩阵(Jacobian)。它描述了一种关系,可以将转动关节的微分运动表示成末端关节的微分运动。注意,雅可比矩阵不是常数矩阵,他随着关节角变化而变化。
像正逆运动学一样,知道了转动关节,也就是电机的角速度,我们就可以求出末端关节的位姿变化速度;另一方面,有了对位姿变化速度的要求,就可以对电机角速度进行设计。
这次就不手撕雅可比了,直接上代码吧。假设我们的 ,看看雅可比矩阵和位姿增量为多少。
用rbt的话直接robot.jacob0(theta_d)。
L(1)=Link('d',105.03,'a',0,'alpha',pi/2,'standard');
L(2)=Link('d',0,'a',-174.42,'alpha',0,'offset',-pi/2,'standard');
L(3)=Link('d',0,'a',-174.42,'alpha',0,'standard');
L(4)=Link('d',75.66,'a',0,'alpha',pi/2,'offset',-pi/2,'standard');
L(5)=Link('d',80.09,'a',0,'alpha',-pi/2,'standard');
L(6)=Link('d',44.36,'a',0,'alpha',0,'standard');
robot=SerialLink(L(1:6),'name','Gluon_6L3', 'manufacturer','innfos')
theta=deg2rad(15*ones(6,1));
T=robot.fkine(theta).T;
D_theta = deg2rad(0.1*ones(6,1));
J = robot.jacob0(theta) %Jacob Matrix
D = J*D_theta
结果为
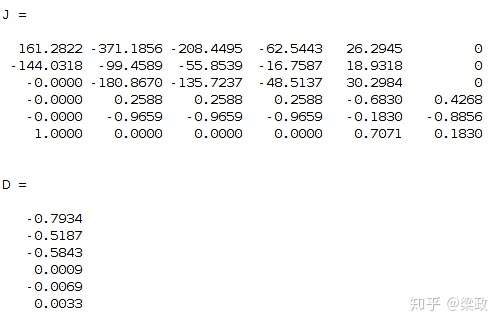
这里 表示的6自由度位姿的增量。
微分变换
在得到位姿的增量后,我们还应该求得位姿T矩阵的增量 和变换后的位姿T矩阵
。
按照基础T矩阵坐标变换,位姿矩阵增量应该是根据位姿得坐标变换得来的。我们的位姿增量[D]为微分形式,所以叫微分变换。
微分平移, ;
微分旋转,

因为是微分项,所以求可近似。近似后旋转顺序可忽略,这样旋转可认为是绕k轴旋转d_theta角,再将高阶项省略。由微分旋转可得变换后的矩阵
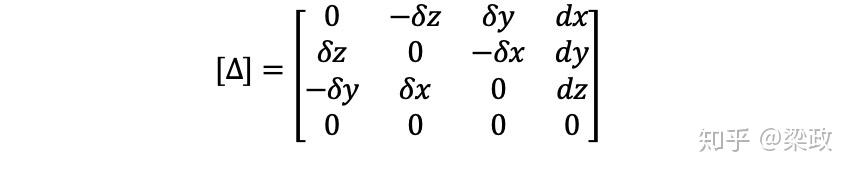
I为单位阵,我们称 为微分算子。
归纳一下,微分算子为
然而,此处的 表示的是相对于固定参考坐标系的微分算子。还有其他微分算子,比如相对于当前坐标系的微分算子
。这个之后要用到,所以要求一下。
相对于固定的左乘,相对于当前的就要右乘。结果应该是一样的,以为描述的相同的变化。所以
归纳一下,相对于当前坐标系的微分算子为

其中
,
,
,
,
,
。
这样我们就可以利用关节转角微分->雅可比矩阵->位姿微分->微分算子->末端微分运动位姿矩阵dT->末端位姿矩阵
我们利用matlab求一下
% 接上部分
delta = [0 -D(6) D(5) D(1);
D(6) 0 -D(4) D(2);
-D(5) D(4) 0 D(3);
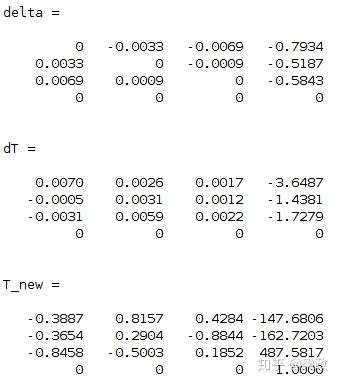
0 0 0 0] %微分算子
dT = delta*T
T_new = dT+T结果如下




评论(0)
您还未登录,请登录后发表或查看评论