

1 面装式永磁同步电机的数学模型
鲁棒非线性伺服控制及应用
京东
¥73.10
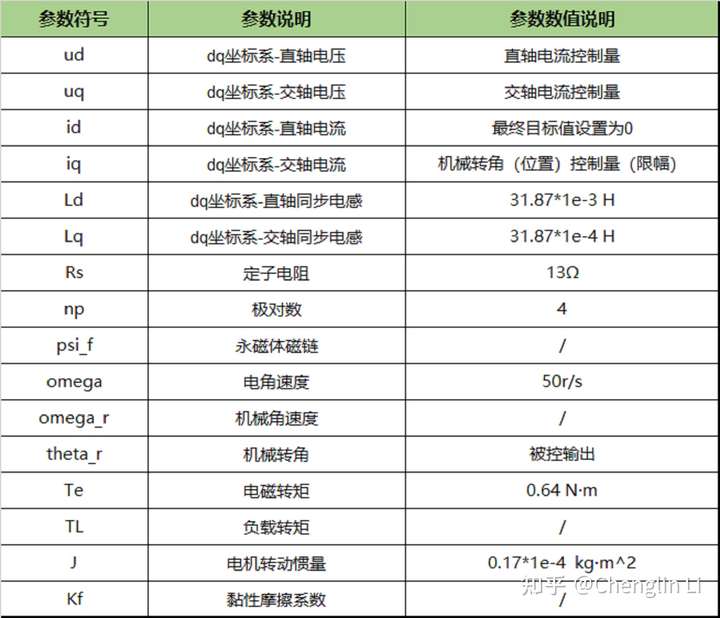
(1)参数说明
![]()
永磁同步电机参数列表.xlsx
(2)间接参数
function pa=parameters()
%% 永磁同步电机参数列表
pa.Ld=31.87*1e-3;
pa.Lq=31.87*1e-3;
pa.Rs=13;
pa.np=4;
pa.omega=50;
pa.Te=0.64;
pa.J=0.17*1e-4;%由于转动惯量过小,因此负载转矩TL对系统影响很大
pa.kf=0.2;
pa.psi_f=3.175*1e-3;
pa.b=1.5*pa.np*pa.psi_f/pa.J;
end2 位置伺服控制策略
(1)使用状态空间描述
变量代换
状态空间
(2)位置(机械转角)控制要求
- 机械转角作为系统的受控输出;
- 交轴电流 作为控制输入量(限幅);
- 直轴电流 目标值为0;
(3)串联系统分析
Chenglin Li:自抗扰控制理论(四)ADRC控制串级系统
Chenglin Li:自抗扰控制理论(二十)无人机的级联系统
Chenglin Li:自抗扰控制理论(二十二)串级系统发散问题
Chenglin Li:自抗扰控制理论(二十七)耦合系统和串联系统综合
- 电流系统是两个一阶系统
- 位置-转角系统是二阶非线性系统
3 数值仿真-位置伺服控制
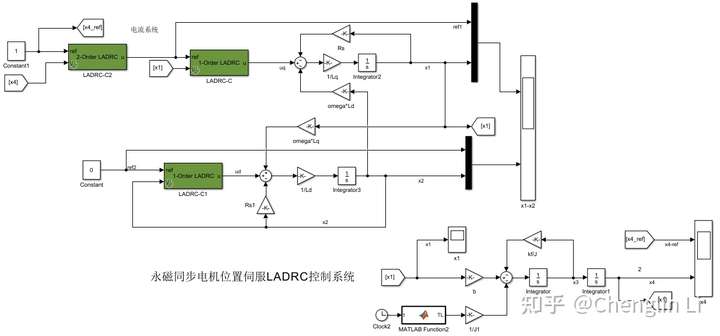
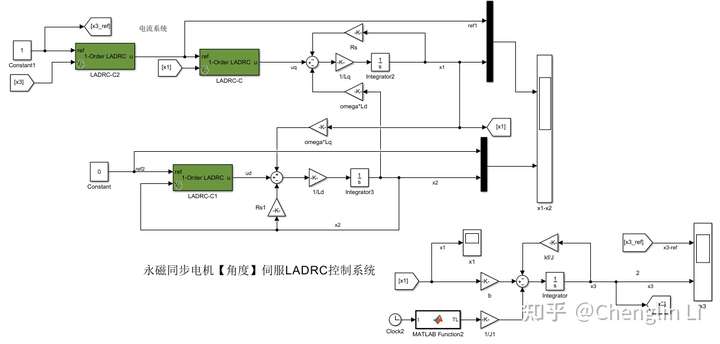
(1)仿真模块
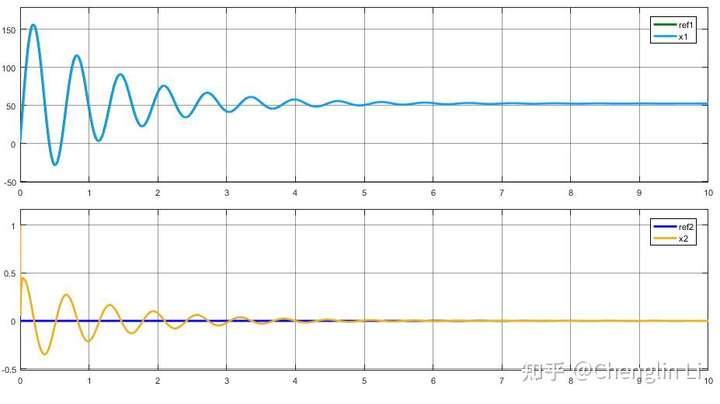
(2)仿真结果(暂不考虑x1饱和输入限幅)
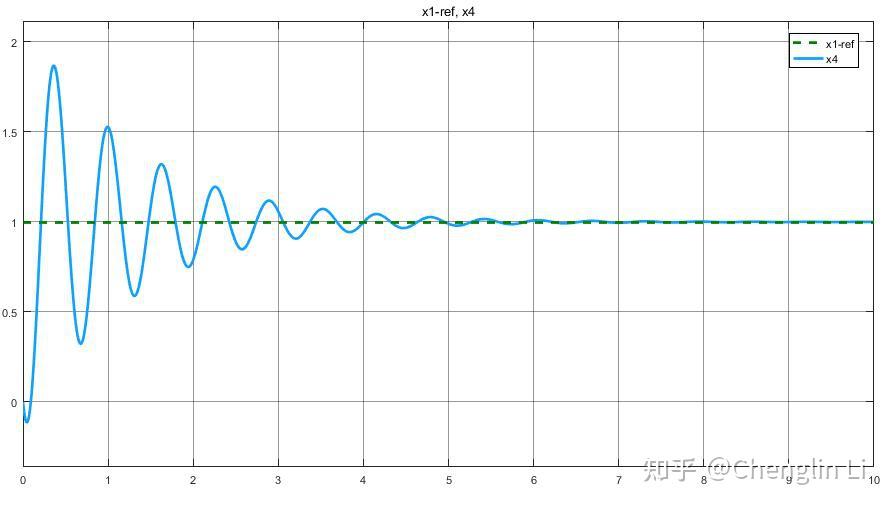
4 数值仿真-角度伺服控制
(1)仿真模块-系统被控输出是角度
(2)仿真结果(暂不考虑x1饱和输入限幅)
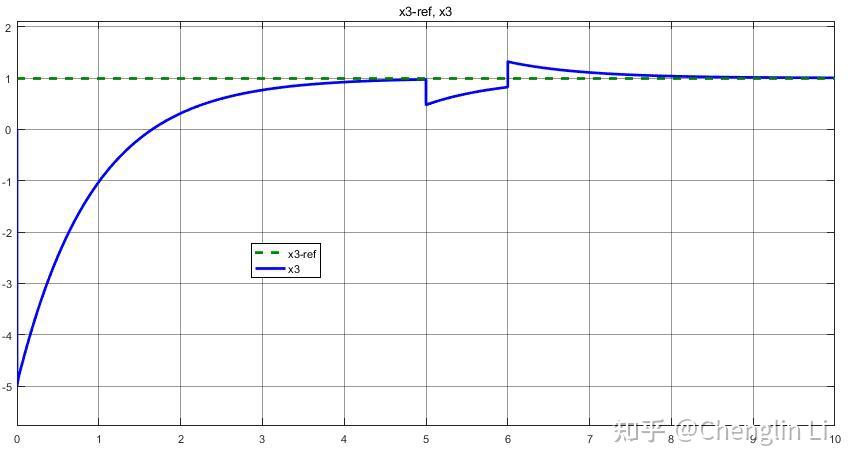
(3)负载转矩设置
function TL = fcn(t)
if(t>=5 && t<=6)
TL=1+0.1;%由于转动惯量过小,因此负载转矩TL对系统影响很大
else
TL=1;
end5 总结
(1)可以将LADRC控制器换成PID控制器;
(2)由于转动惯量过小,因此负载转矩TL对系统影响很大;
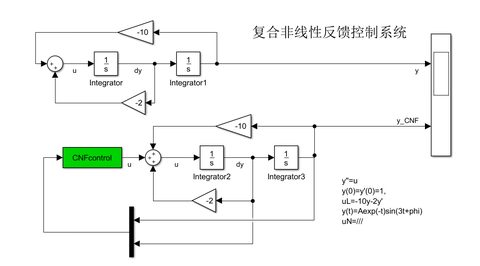
(3)负载转矩波动引起系统输出很大的超调量,可以采用CNF的思想来削减超调量;
(4)对于交轴电流x1饱和输入限幅的情况,可以参考TOC的方法或者引用Lan Weiyao和Chen Benming对于CNF+饱和输入的研究文章;
——2021.07.24—




评论(0)
您还未登录,请登录后发表或查看评论