

目前,机器人在工作中需要与环境或用户发生交互影响,比如波士顿Atlas,康复外骨骼,手术机器人,以及协作机器人等。这种应用场景下,单纯的位置控制不能满足要求,它容易使机器人与外界发生强烈的抵触,进而容易使机器人伤害到用户,也伤害到机器人本身。力控(或柔顺控制)应运而生。

力控中最关键的还是要识别机器人与外界或用户的交互力。传统的工业机器人的结构,由于减速器引入的摩擦力难以精确建模,使得通过电流反馈的方式无法实现对交互力的精确及时估计。在结构中引入力矩传感器显得很必要。
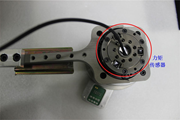
然而,引入力矩传感器哦并不是万事大吉,而是打开了另一个潘多拉魔盒。以关节力矩传感器为例,它的刚度(80kNm/rad)较低,与谐波减速器串联再一起,这使得机器人关节刚度进一步降低(弹簧串联的效果相当于电阻并联),位置控制精度和稳定性大大降低。
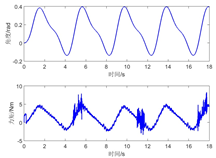
另一方面,力矩传感器的信号噪声很大,难以直接使用;而对其滤波则会引入延时,这对控制器的影响也是非常不利的。
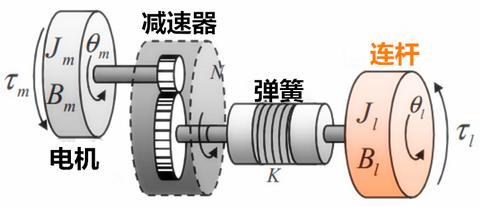
目前看来,SEA(serial elastic actuator,串联弹性驱动器)是最好的一种力控结构。它包括一个弹性体(力矩传感器)和两个编码器。通过两个编码器,可以对关节的柔性变形进行建模。SEA只是提供了一种综合力控和位置控制的可能性,最终要实现好,还需要在系统辨识和控制算法上狠下功夫,这里的难度还是很大的。
总结:力矩传感器只是提供了一种提高机器人力控性能的途径,但用的不好会被反噬;它不是一劳永逸,而是打开了另一个潘多拉之盒。




评论(0)
您还未登录,请登录后发表或查看评论