

1.前言
机器人传统的位置控制主要还是基于三环PID反馈控制来实现的。这种策略的优势是操作员不需要对系统进行建模,仅通过参数调节即可获取优异的位置追踪响应性能,且PID控制器鲁棒性好,抗干扰能力强。因此目前这种三环串级式PID控制器成为机器人乃至整个自动化领域的主流选择。遗憾的事,我们无法从理论上严格证明PID控制器的稳定性,只是它好用,所以我们一直用它。
2.动力学前馈
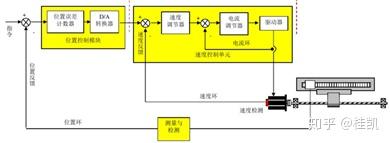
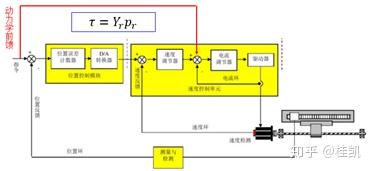
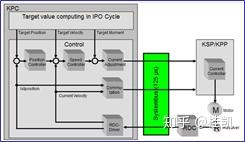
控制理论本质上是基于系统动力学理论及稳定性判据而诞生的学科。对于常见的串联型机器人的动力学方程,已很成熟(机器人动力学方程的四种形式)。因此近期越来越多的技术人员尝试将机器人动力学信息加入到控制器中。这其中最有效果的当属动力学前馈技术了,其基本原理是驱动器工作在CSP(周期性同步位置)模式下,控制器会同时往位置环发送位置指令和向电流环发送力矩前馈指令,而这里的力矩前馈指令就是依据动力学计算出来的。
从控制原理上,加入力矩前馈性能是会变好的(浅显直观地解释机器人控制为什么需要动力学建模)。然而,我们不能太看轻PID控制器的能力了,通过这种串级式的控制,PID在位置控制的性能上,已炉火纯青;也就是说,原先PID控制器给出的性能基线已经很高了,仅仅是加入了动力学前馈,而其他方面未提高,最终控制器的性能不一定会得到提高,就好比木桶效应,仅加长了动力学这一块板,机器人木桶的盛水量并不能得到提高。
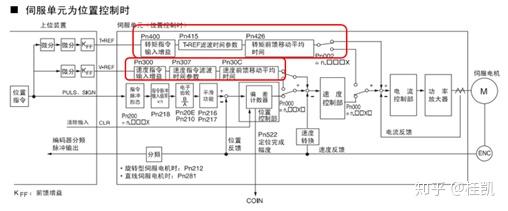
事实上,现在很多伺服系统中已加入了速度前馈及加速度前馈功能,如下图的安川伺服。这种前馈是动力学前馈的一种简化易用形式,能获取很好地效果。
3.陷阱
之前测试过一套用国产伺服做的中型和小型机器人的位置相应性能,它的控制器只发送了位置指令值,没有发送力矩前馈值,伺服里开放了速度前馈及加速度前馈功能;测试效果如下,其实际轨迹与指令轨迹延迟大概十几到几十毫秒,测试ABB大致型号的机器人,其延迟也相当。而加入动力学前馈技术,能否将延迟进一步缩小到十毫秒以内,这会是个巨大的挑战。
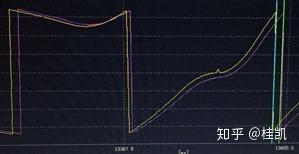
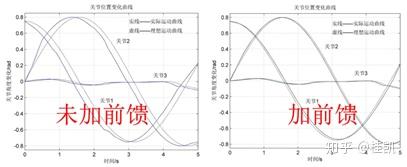
现有的很多中文文献中把动力学前馈技术感觉都吹上了天,似乎只要加入了前馈,机器人就能上一个台阶了。他们往往给出如下的证据,从图中可明显看出加入前馈后,轨迹追踪性能变好了很多;然而这种比较完全是不对等的比较,因为你左侧纯PID控制并没有做到最优,且右侧的延时也有近百毫秒。
4.总结
- 对于小型机器人来说,其自身较轻,动力学力矩不大,加入力矩前馈意义不会很大,把轨迹规划做好,以及在驱动器中加入速度及加速度前馈,位置性能足够好了。
- 若真想把力矩前馈的优势发挥出来,得在两个方面下功夫:
动力学方程是否足够精确,哪些力需要加入到前馈中,要加多少比例(加多了容易超调),都是需要仔细衡量及调整的
机器人系统的其他环节是否足够优异:本体的刚度是否足够,控制器施加前馈力矩的频率是否足够(参考部分控制器施加力矩前馈的频率)

虽然我是从事于机器人动力学研究的,但窃以为不要把动力学前馈技术吹得过猛。机器人是一个大系统,需要各环节相互配合,才能相得益彰。




评论(0)
您还未登录,请登录后发表或查看评论