

文章目录
一、实现电流闭环
二、实现转矩闭环
三、实现速度闭环
四、波形分析
Simulink永磁同步电机控制仿真系列文章已经发布两篇,每篇文章都开源simulink仿真模型。在此抄录前两篇文章地址,供有需要的朋友查阅。
Simulink永磁同步电机控制仿真系列一:让电机动起来
Simulink永磁同步电机控制仿真系列二:闭环控制前的准备工作
一、实现电流闭环
本次实验在第二篇文章的基础上进行,Simulink永磁同步电机控制仿真系列二:闭环控制前的准备工作中已经实现了永磁同步电机的开环控制,本节在原模型的基础上添加反馈路径,实现转矩的电流闭环控制。
本文采用id = 0的控制方式。
电流闭环控制需要实现dq轴电流解耦,矢量控制中使用clark变换和park变换实现dq轴电流的解耦,永磁同步电机控制笔记:clark变换park变换示意图中对相关原理做出了说明。
本次实验为了降低模型复杂度,不使用clark,park变换获得dq轴电流,而是直接使用pmsm模型提供的dq轴电流。
使用模型提供的dq轴电流做反馈电流,使用constant模块输入参考电流,使用pid模块实现电流闭环。使用pid模块时,只用到pi调节器,考虑到pwm发波频率有限,pi调节器计算频率没有必要设置的太快。此处采样时间设置为1e-4,为了使输出电流不失真,对pi调节器限幅到-0.57~ 0.57,pi模块在此处的意义为将dq轴误差电流转换为dq轴电压。逆变器输出不失真范围对应pi调节器输出-0.57 ~ 0.57的原因在文章永磁同步电机控制笔记:空间矢量调制svpwm实现及分析中有说明。
仿真连接如图: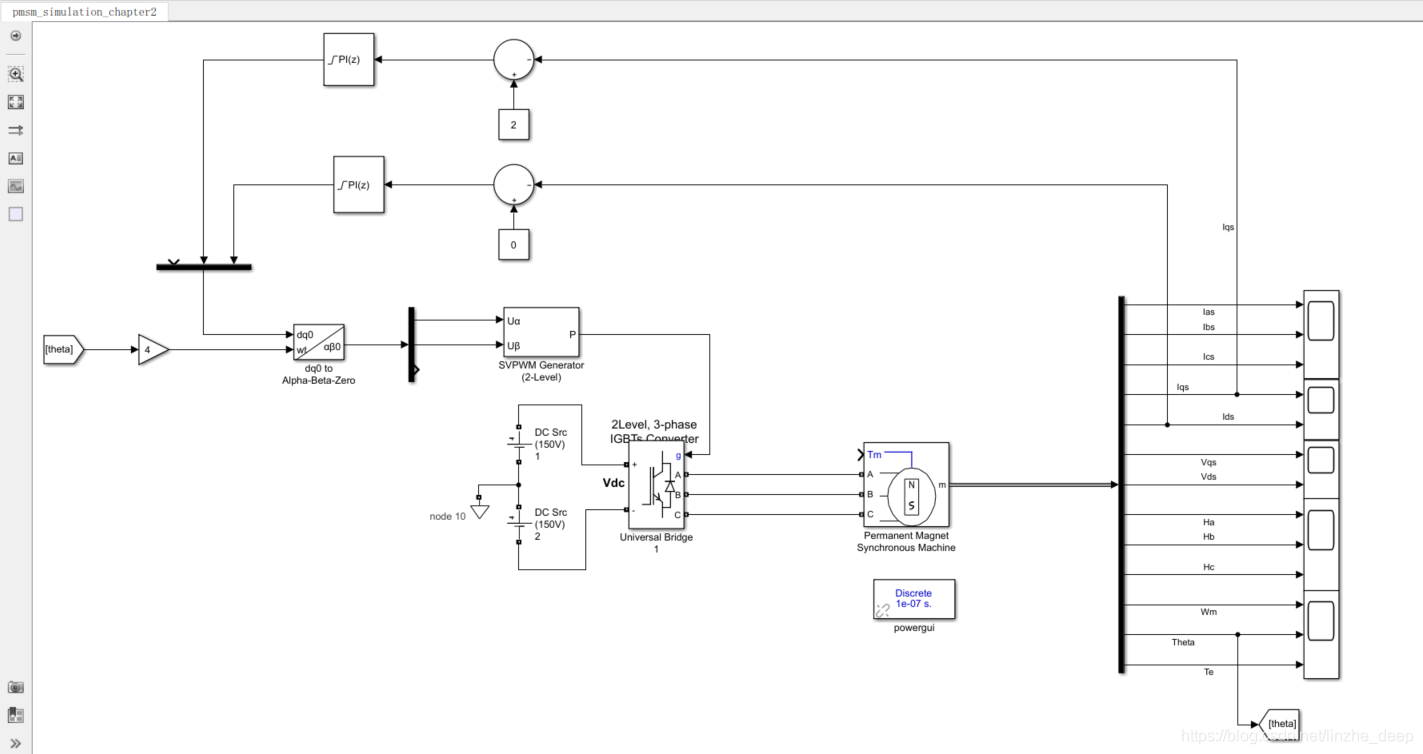
id,iq 两个pi模块参数暂且都设为0.2,后续文章具体分析环路。
二、实现转矩闭环
首先来看转矩公式:
Te = 3/2pn(Φfiq + (Ld - Lq)idiq)
对于隐极式永磁同步电机来说Ld = Lq,转矩全部来源于iq,对于凸极永磁同步电机来说,输出转矩除来自Φf的转矩之外还有磁阻转矩。应用id = 0控制时,转矩同样和iq成比例。
id = 0控制方式下,转矩控制本质上是对iq的控制。当id = 0,时,转矩常数即可描述iq 和转矩之间的关系。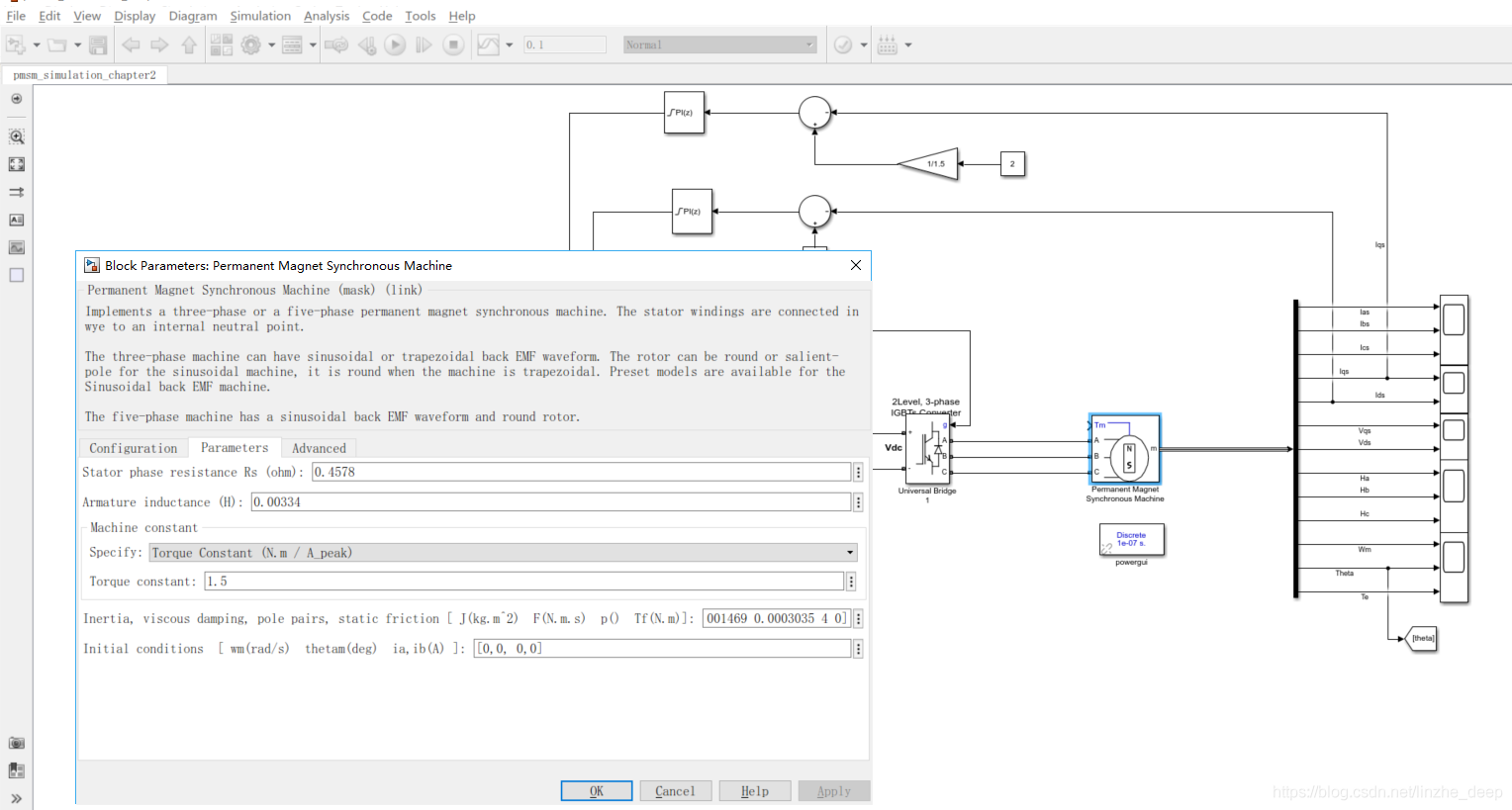
修改仿真如下,此时的参考值即为转矩,为了实现恒转矩控制,需要堵转电机,本次实验使用增加电机轴惯量的方式实现。在电机参数面板调大电机惯量,运行仿真。
此时电机近似静止,输出转矩在pi调节下快速稳定在给定转矩,此时输出q轴电流约为2/1.5,1.5为转矩常数。可以观察到d轴电流随着转速的增加,d轴电流随着转速的增加存在微小的上升,这个变化是由于id,iq未实现完全解耦。
三、实现速度闭环
实现速度闭环时,保持id轴电流环路不变,通过调节转矩即q轴电流来调节速度,速度环依然采用pi控制,连接模块如下图,此时速度环输入参考量为速度,rad/s,速度环的输出为q轴电流,也可以认为是转矩。速度环pi调节器根据电机的额定电流限幅,额定电流相应的q轴电流可以通过额定转矩除以转矩系数计算。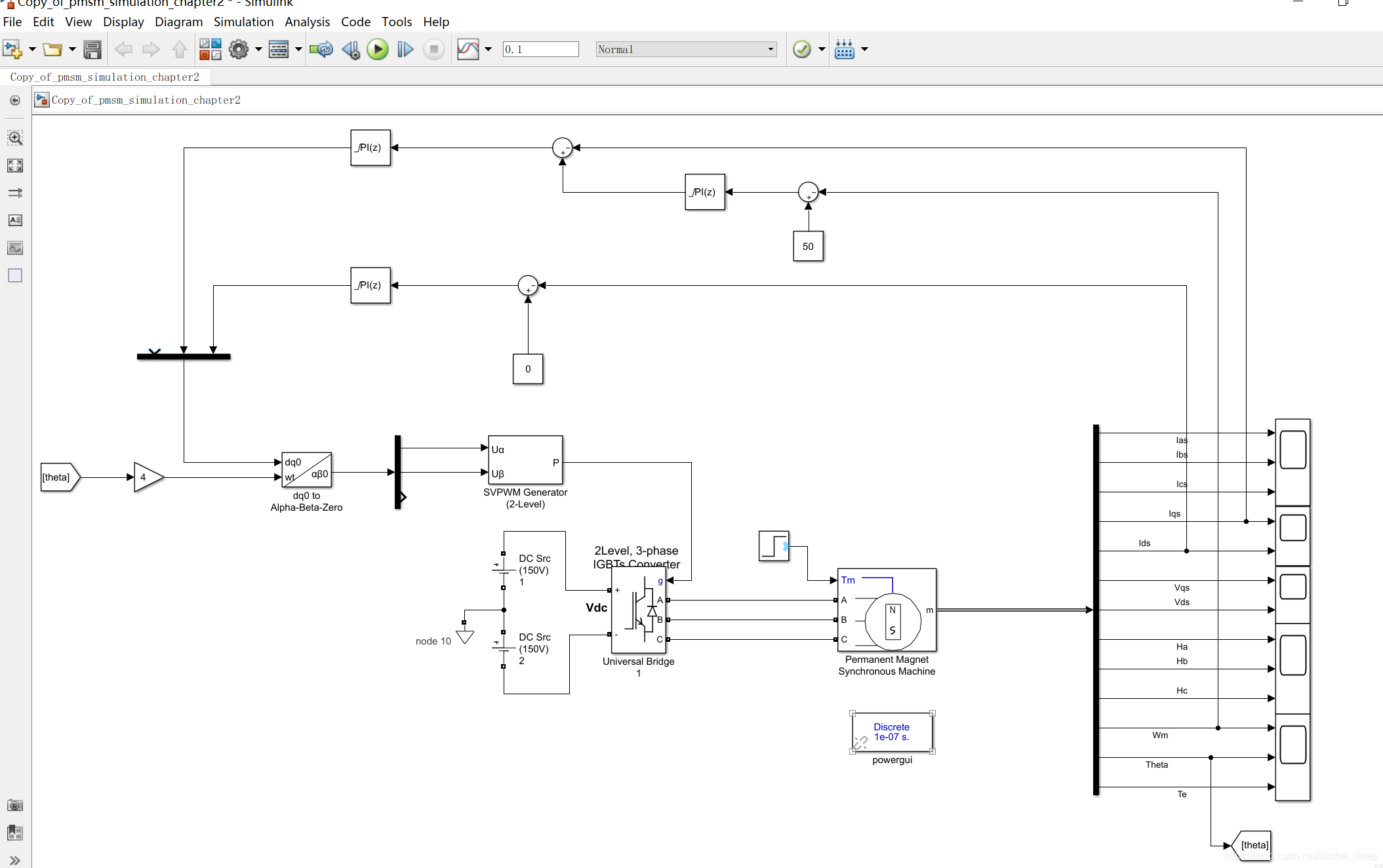
运行仿真前将之前测试转矩环时调大的电机转子惯量恢复,此处使用阶跃信号通过给电机施加恒转矩来加载,速度环pi参数根据多次实验结果调整。
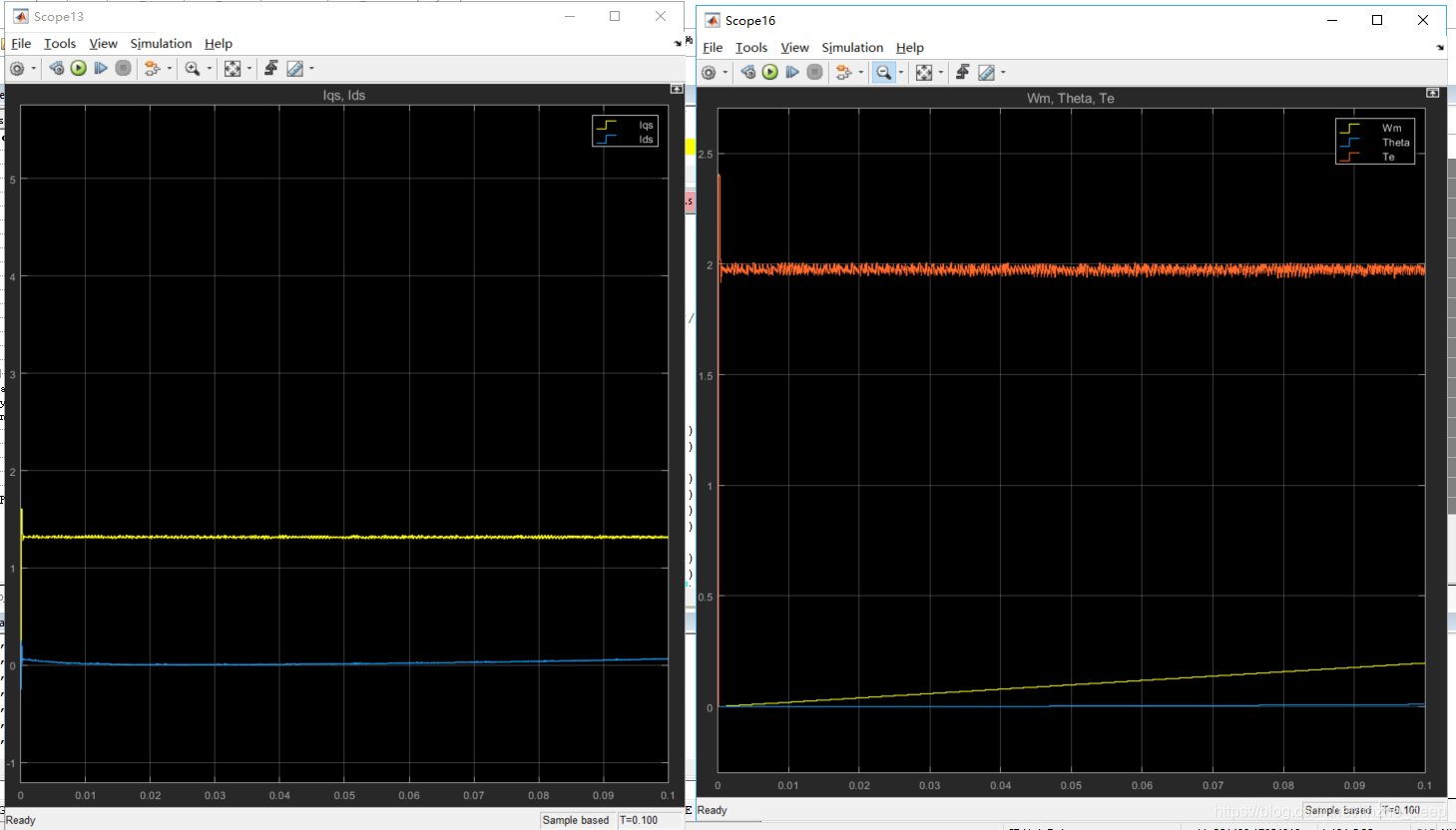
运行仿真:
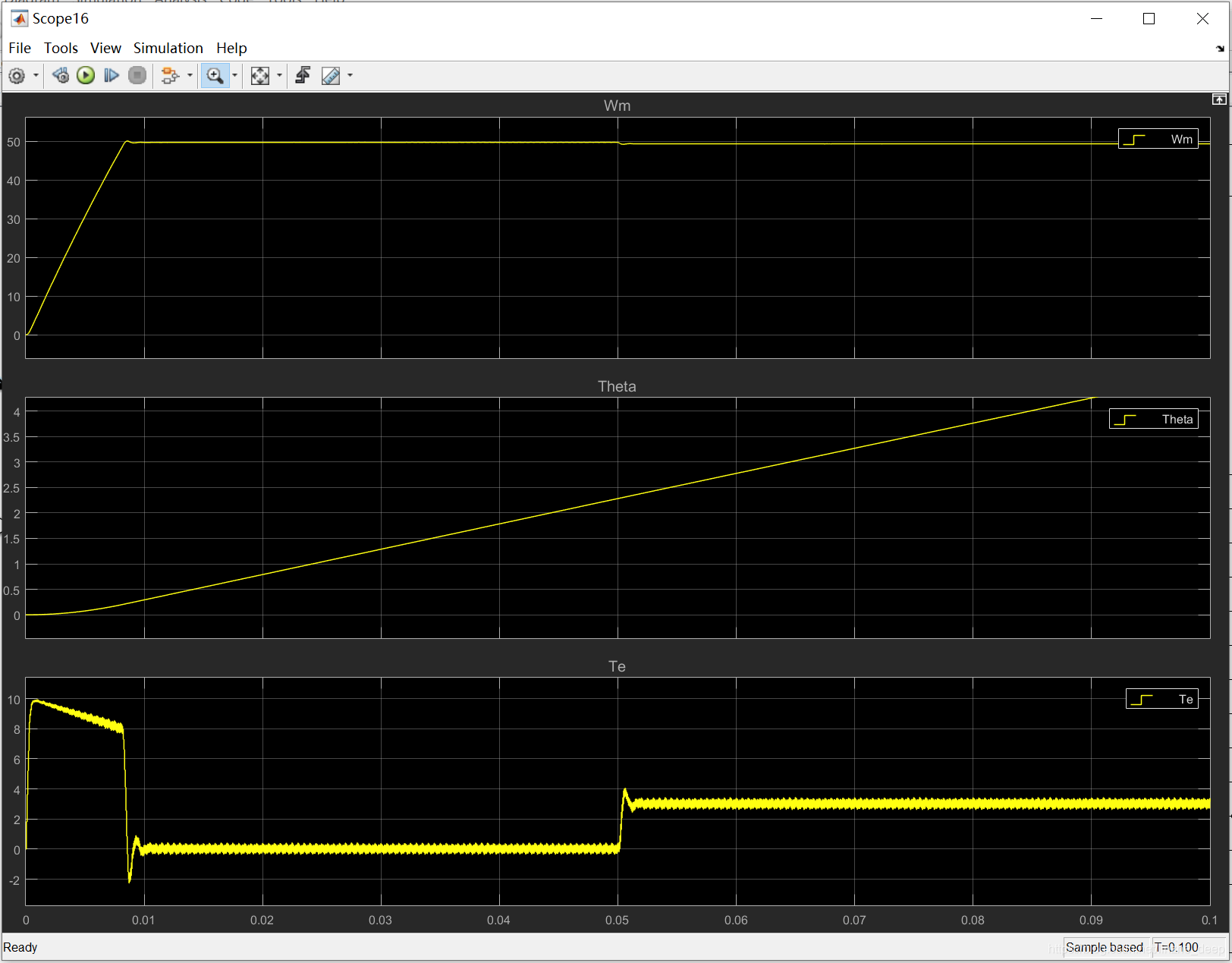
可以看到,在速度环和电流环的作用下,电机转矩迅速达到额定转矩附近,速度快速提升,并稳定在给定转速,在0.05s的时候电机负载突变,然后电机速度发生了一个较小的波动,并立马恢复。
该模型能够较好的实现速度控制。
此时观察dq轴电流。
可以看到q轴电流变化规律和转矩一致,d轴电流并没有保持到给定值。
四、波形分析
摘录电流公式如下:
pid = 1/Ld·vd - R/Ld·id + Lq/Ldpn·ωm·iq
piq = 1/Lq·vq - R/Lq·iq - Ld/Lqpn·ωm·id - Φ·pn·ωm/Lq
公式来自matlab帮助,其中p为微分算子,pn为极对数。
该电机Lq = Ld,将上式简化为:
pid = 1/Ld·vd - R/Ld·id + pn·ωm·iq
piq = 1/Lq·vq - R/Lq·iq - pn·ωm·id - Φ·pn·ωm/Lq
注意到id和pn·ωm·iq 有关,即随着速度变大,或者iq变大,id会增加,同时iq的表达式包含- pn·ωm·id - Φ·pn·ωm/Lq,该式子说明随着速度变大,id变大,iq会减小。
上述式子说明尽通过clark park变换无法实现dq轴电流完全解耦,想要真正实现控制iq的时候id不变,控制id的时候iq不变,需要在模型中增加解耦算法。相关算法将在本系列后续文章中尝试实现。
如果内容对各位看官有一定帮助,作者感到十分荣幸,在此也希望得到您的鼓励,请别忘了点个赞哦~




评论(0)
您还未登录,请登录后发表或查看评论