

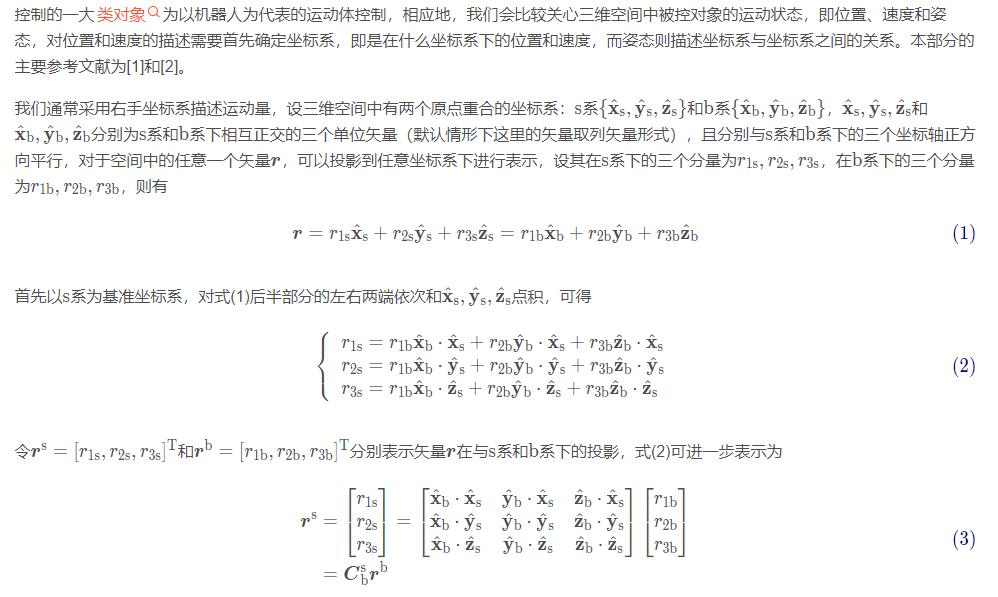
控制的一大类对象为以机器人为代表的运动体控制,相应地,我们会比较关心三维空间中被控对象的运动状态,即位置、速度和姿态,对位置和速度的描述需要首先确定坐标系,即是在什么坐标系下的位置和速度,而姿态则描述坐标系与坐标系之间的关系。本部分的主要参考文献为[1]和[2]。


控制的一大类对象为以机器人为代表的运动体控制,相应地,我们会比较关心三维空间中被控对象的运动状态,即位置、速度和姿态,对位置和速度的描述需要首先确定坐标系,即是在什么坐标系下的位置和速度,而姿态则描述坐标系与坐标系之间的关系。本部分的主要参考文献为[1]和[2]。


您当前积分:0

评论(0)
您还未登录,请登录后发表或查看评论