

送一你个添加陀螺噪声的Simulink模块
通常按照Allan方差来衡量,陀螺的噪声一共有五项。在simulink仿真中,想把这五个噪声都添加进入不是一件容易的事情。为了不让大家在旁支末节上浪费时间,我直接给大家提供一个已经搭建好的simulink模块,拿走记得谢谢(注1).

第一项是零偏,添加一个初始的零偏就可以了。
第二个是角随机游走,按照手册上给就行了。
第三个是零偏不稳定性,如果你只有10s平滑的零偏稳定性,直接给就差不多,如果是100s平滑的零偏稳定性,乘以根号10再加进入。
第四个第五个一般手册上不给,你要是不测实际数据,直接赋值为0就好。
第六个为离散计算时间,要和系统的离散时间一致,如果仿真系统不是固定时间间隔运行的,要实时计算两次计算之间的间隔,这个很简单。
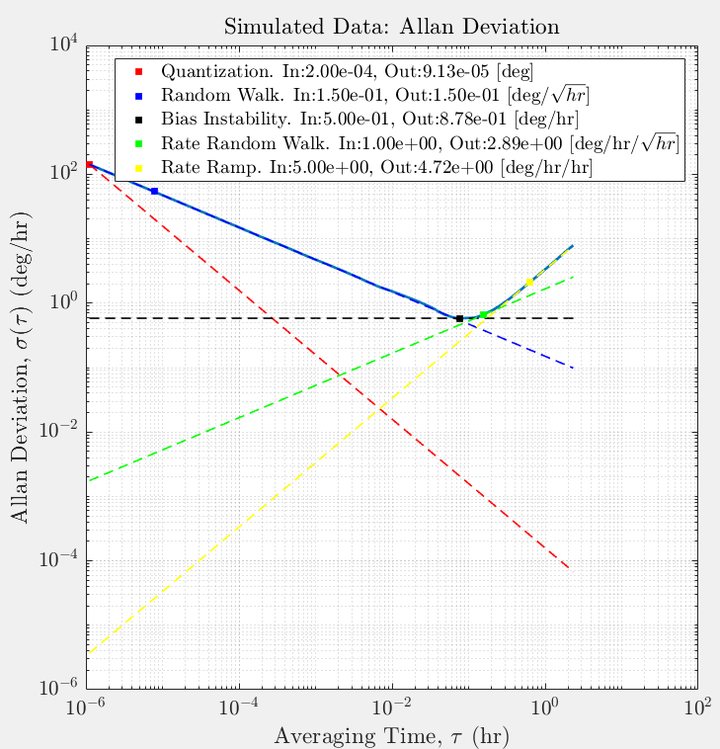
这是将仿真出来的数据再重新计算Allan方差,对比一下看看输入输出,虽然不是特别准,但是已经可以了!!
注1:链接:https://pan.baidu.com/s/1zudqd2HCoVb0W-Oog1AbYg 密码:lrm6
陀螺系列:

欢迎指正讨论,转载请注明,认同请点赞。
为什么那么多人都是只收藏不点赞不评论啊(表情捂脸哭)!
麻烦大家给我一个反馈。



评论(0)
您还未登录,请登录后发表或查看评论