

利用陀螺数据设置卡尔曼滤波Q阵
卡尔曼滤波的Q阵意味着系统模型的可信程度,精确地设置Q阵有利于提高卡尔曼滤波器的精度。其中相关的值对应着陀螺(或者加速度计)的参数,通过测量陀螺数据可以更好地指导调节Q阵。
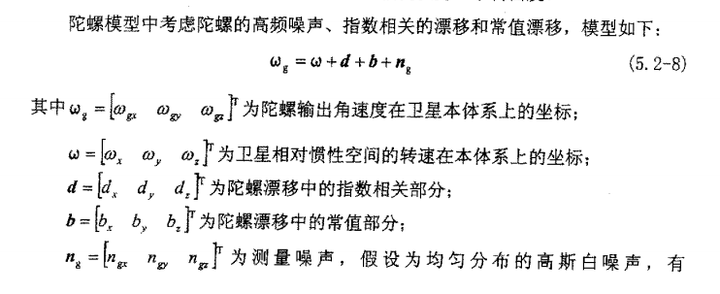
其中陀螺噪声可如下表示:
利用星敏感器和陀螺联合定姿的卡尔曼方程如下:
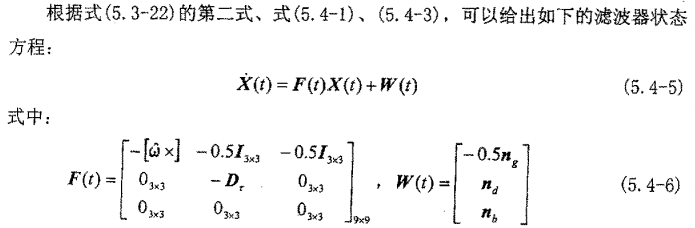
方程的Q阵如下:
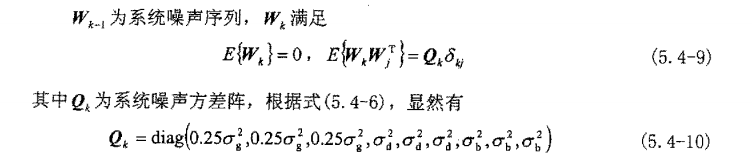
所以找到Q阵中σg,σd,σb所对应的陀螺参数就好了。
σg对应的状态量是角度误差值,因此其对应这陀螺的角随机游走,这是陀螺的一个非常重要的参数,来衡量陀螺的噪声,
σd对应的状态量是一阶马尔可夫过程,对应的是陀螺的零偏不稳定性(注1)。
σb对应的状态量是陀螺的零偏,对应的陀螺指标是角速度随机游走,这个指是通过allan方差计算出来的。
状态量对应的方差量的单位应该是状态量单位的平方,Q阵离散化后恰好对应。
Allan方差测试时要注意。时间要足够长,大于两个小时,否则可能测不出来角速度随机游走。测试时要保持静止,不要加滤波器。否则测试出来的allan方差不准确。
Allan方差测试出的数值,只能给Q阵提供参考作用,最优的效果还是要微调,一是不同测试环境下的Allan结果可能有变化,二是动态的陀螺性能和静态并不相同。
注1:http://blog.sina.com.cn/s/blog_40edfdc90102y1ar.html
注2:陀螺参数意义以及工程转换 - FrancisZhao的文章 - 知乎 https://zhuanlan.zhihu.com/p/46927493
陀螺系列:

欢迎指正讨论,转载请注明,认同请点赞。
为什么那么多人都是只收藏不点赞不评论啊(表情捂脸哭)!
麻烦大家给我一个反馈。



评论(0)
您还未登录,请登录后发表或查看评论