


简述五种PID积分抗饱和(ANTI-Windup)方法
PID控制是应用最广泛的控制结构,但是如果仅仅使用最简单的PID,大概率是不合格的。
PID控制中积分项的作用是抵抗常值‘’力‘’的干扰,保证系统的稳态精度,但是积分项很容易陷入饱和,导致系统超调与迟钝(注1),下面简述几种积分抗饱和的方法。
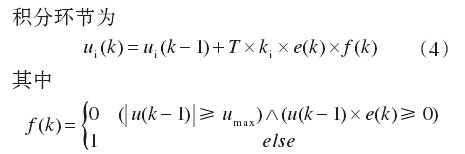
1 积分遇限消弱法(clamping)
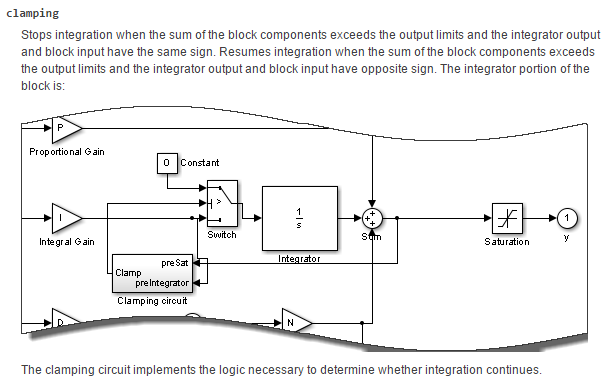
基本思想:当执行器处于饱和、且误差信号与控制信号同方向(同号)时,积分器停止更新(其值保持不变),除此之外,积分器正常工作。即,在饱和情况下,只进行有助于削弱饱和程度的积分运算。
2 积分分离
基本思想:在系统误差较大时,取消积分环节;当误差较小时,引入积分环节。这样既不影响控制器的动态性能,又可以提高控制器的稳态精度
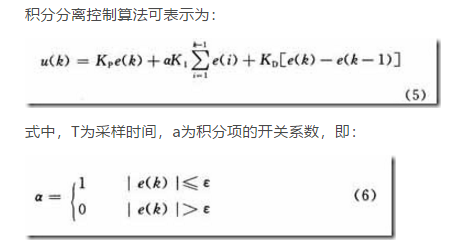
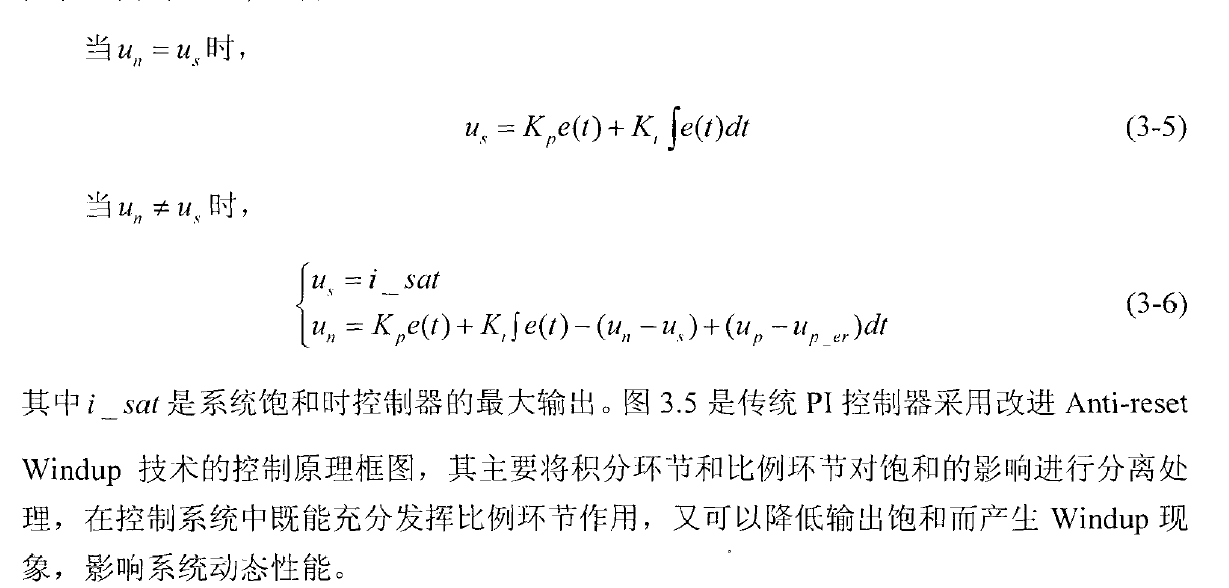
其中系数α的函数也可以分成三段。或者设置为某种函数,误差大时积分系数小,误差小时积分系数大,这就是变速积分的思想,由此可见,积分分离是一种简化的变速积分方法。
3 反馈抑制抗饱和(back-calculation)
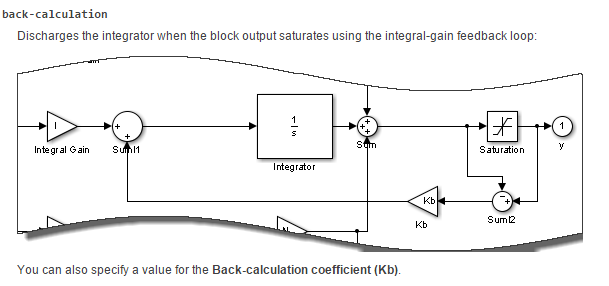
基本思想:当饱和时,对积分项加入负反馈,使其尽快退出饱和。
其中Kb设置的范围为0.3~3*Ki/Kp,默认的为Ki/Kp即可(注3)。
4 反馈抑制抗饱和的一种改进
传统的反馈抑制对系数比较敏感,如下图
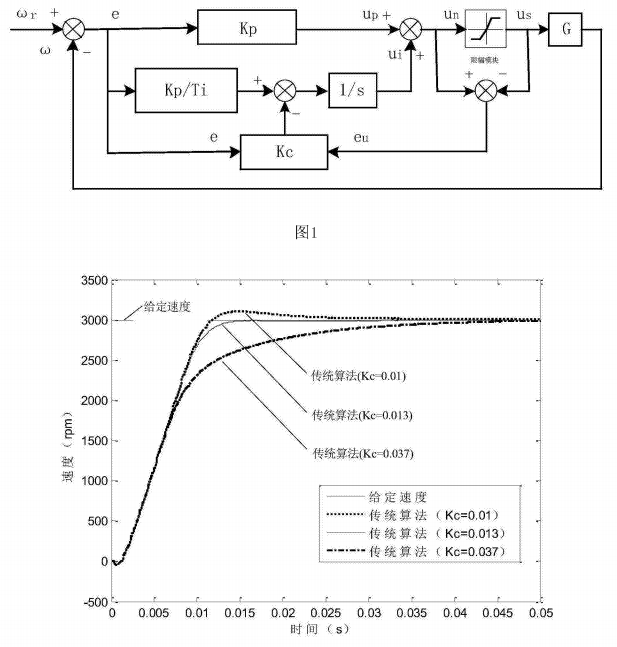

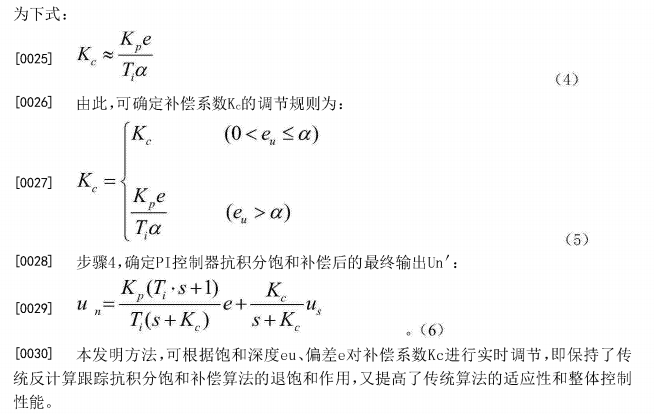
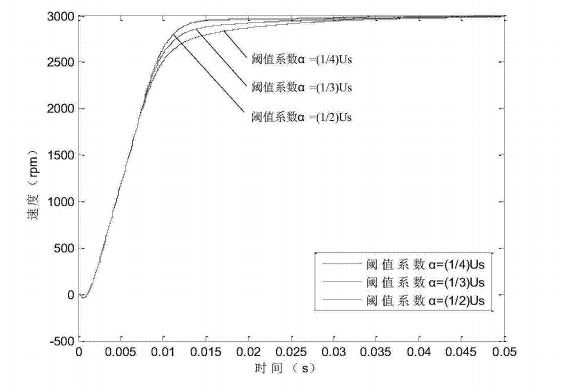
基本思想:饱和程度的不同来调节反馈系数 ,饱和程度越深,反馈系数越大。
5 反馈抑制抗饱和的另一种方法
(注5)
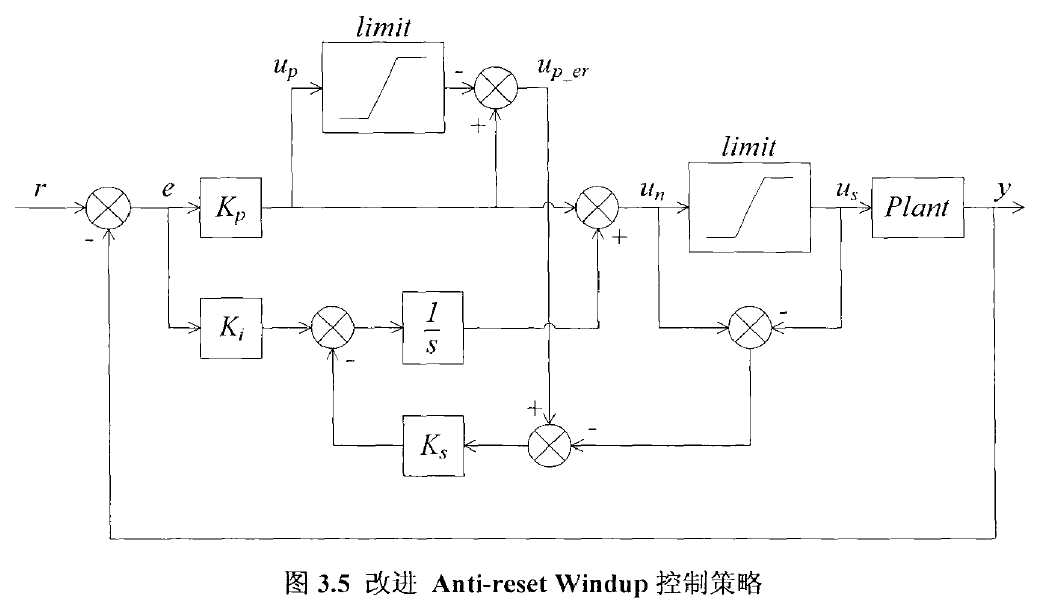
其中Ki至1/s之间的sum两端都该是应+,作者的一个笔误
不同的控制系统适应不同的抗饱和方式,如果不清楚应该用哪一种,那么就用第三种,参数设置为Ki/Kp,就能获得不错的效果。
注意一种严重的错误:直接对积分的输出限幅,这样积分依然继续,并没有停止。
注1:积分饱和现象 https://zhuanlan.zhihu.com/p/37822077
注2:simulink中PID的help
注3:《电机传动系统控制》
注4:埃斯顿发明专利
注5 :基于滑模变结构方法的永磁同步电机控制问题研究及应用_齐亮
欢迎指正讨论,转载请注明,认同请点赞。
为什么那么多人都是只收藏不点赞不评论啊(表情捂脸哭)!
麻烦大家给我一个反馈。



评论(0)
您还未登录,请登录后发表或查看评论