


对给定值的处理:给定的滤波、路径规划、安排过渡过程
PID的给定值可以是跳跃的不连续的,但是反馈量大多是真实的物理过程,是连续光滑的。因此,给定量与反馈量的差值可能是不连续的,突变的,会导致系统的冲击或系统的超调,这些都是我们不愿看到的。对给定值的处理可提升控制器的性能,常用的方法有以下三种:
(为描述方便,将给定值假设为位置,对应的一二阶导数分别为速度加速度。)
1 给定的滤波
给定的滤波是指给定值和反馈插值之间增加滤波器,使跳跃不连续的给定值变得光滑。具体方法参见我的上一篇文章中IP控制器转化为二自由度滤波器的部分。
2 路径规划
路径规划这里指的是:已知初始位置、最终位置和所需时间,来规划给定值的轨迹。按照平滑程度的增加,可分为:三次多项式平滑、五次多项式平滑、七次多项式平滑,分别对应着速度连续、加速度连续、加加速度连续。
给定的曲线基于三次多项式的描述:
q(t)=a0+a1(t−t0)+a2(t−t0)^2+a3(t−t0)^3,t0≤t≤t1
q指给定的位置,t为时间.。一旦指定了t0,t1时刻的位置和速度的值(q0,q1v0,v1) ,可以通过解方程来得出a0至a3的值,因此,在t0至t1时刻,位置曲线可以利用三次多项式表达出。
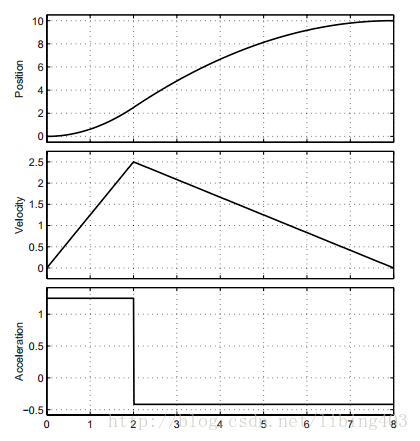
由图可知,三次多项式位置是光滑的,速度是连续的,但是加速度就是不连续的了。
同理,系统如果对光滑和平稳定要求较高时,可以利用五次或者七次多项式规划,原理和方法与三次多项式相同
3 安排过渡过程
在《自抗扰控制技术》中,韩老师提出了一种TD微分跟踪器,可以利用系统的最大加速度来安排过渡过程,减小系统饱和与超调。其方程如下:
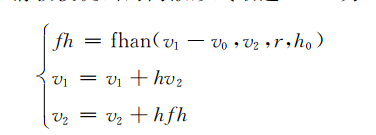
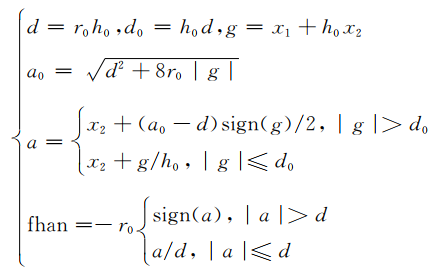
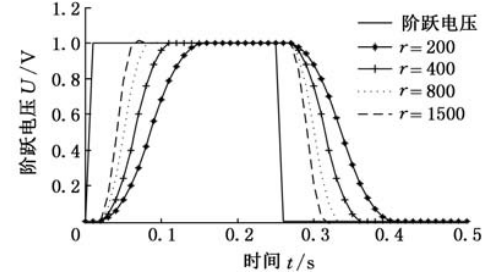
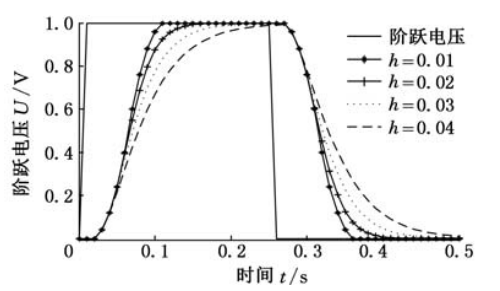
其中v0是输入变量,v1是安排后的输出。h0是滤波因子,h0大于采样频率h是可对输入进行滤波,滤波因子越大,滤波效果越好。r是速度因子,TD的带宽约为1.14*sqrt(r)。对于阶跃的过度过程来说,位置信号前半段以r的加速度加速,后半段以-r的加速度减速,过度过程的时间T0=2/sqrt(r),最大速度Vm=sqrt(r)。因此对于位置信号而言,r就是系统最大的加速度能力,在电机控制系统中,正比于电机的最大转矩。书中的TD还有很多用途,这里我们仅用其安排过渡过程,h0设置为采样时间即可。
TD的Simulink程序见附录,直接用即可。
4 总结
方法1在出现积分饱和与超调时很有效,但是在无饱和的情况下,输入增加滤波会降低系统的带宽。
方法2时必须已知规划所需的时间,因此多用于机械臂等机器人控制的规划,或者初始状态可最终状态要求比较明确的场合。但是比如无人机的姿态控制,这种方式就不适合。
方法3适合初始和最终状态并不明确、但是最大的加速度能力已知的情况下,适合无人机的姿态控制或者电机的位置环。但是缺点是加速度不连续,容易激发系统的谐振等。
没有最好的控制方法,只有最适合的。因此在选择对给定的处理方法时,一定要清楚设计需求,清楚系统状态。
注1 多项式轨迹规划参照https://blog.csdn.net/libing403/article/details/78698322
注2 TD微分跟踪器的Sinulink程序百度网盘下载链接:



评论(0)
您还未登录,请登录后发表或查看评论