

一、背景
滑模控制理论(Sliding Mode Control, SMC)是一种建立在现代控制理论基础上的控制理论,主要数学核心为李雅普诺夫函数。
滑模控制的核心思想是建立一个滑模面,将被控系统拉取到滑模面上来,使系统沿着滑模面运动。滑模控制的一个优势是无视外部扰动和不确定参数,采用一种比较“暴力”的方式达到控制的目的。
其思想和反步法有些类似,但数学实现起来更加方便而不抽象。相比反步法,滑模控制没有复杂的数学计算,也不会出现“微分爆炸”的问题。但另一方面,滑模控制所采用的控制信号大多是具有正负值反复交替的信号,对于硬件要求很高,一般硬件无法达到这种信号高频来回切换的要求,因此这是滑模控制的一个缺点。
除此之外,信号高频切换所导致的输出信号会出现振荡,系统状态在所选取的滑模面附近来回颤动,这种颤动是无法消除的。这也是滑模控制的一个痛点,目前主流的方法大多是采用滤波、模糊控制、神经网络等方法对震颤进行缓解。
二、数学理论
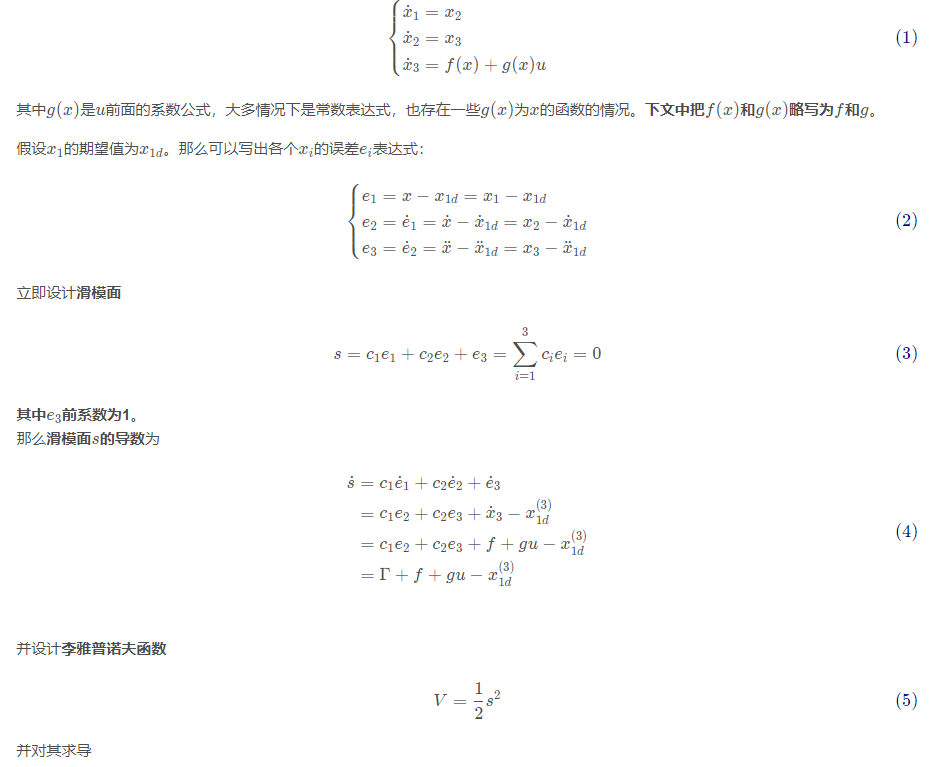
这里以一个三阶系统为例。
设有一个标准三阶系统







评论(0)
您还未登录,请登录后发表或查看评论