

四旋翼基本参数
四旋翼作为一种可以在空间中自由飞行的无人飞行器,具有6个自由度和4个螺旋桨。其中,4个螺旋桨提供动力,作为四旋翼的动力源;6个自由度分别为:3个位置坐标x , y , z ,3个角度坐标θ \thetaθ(俯仰),φ \varphiφ(滚转),ψ \psiψ(偏航)。三种角表示如下: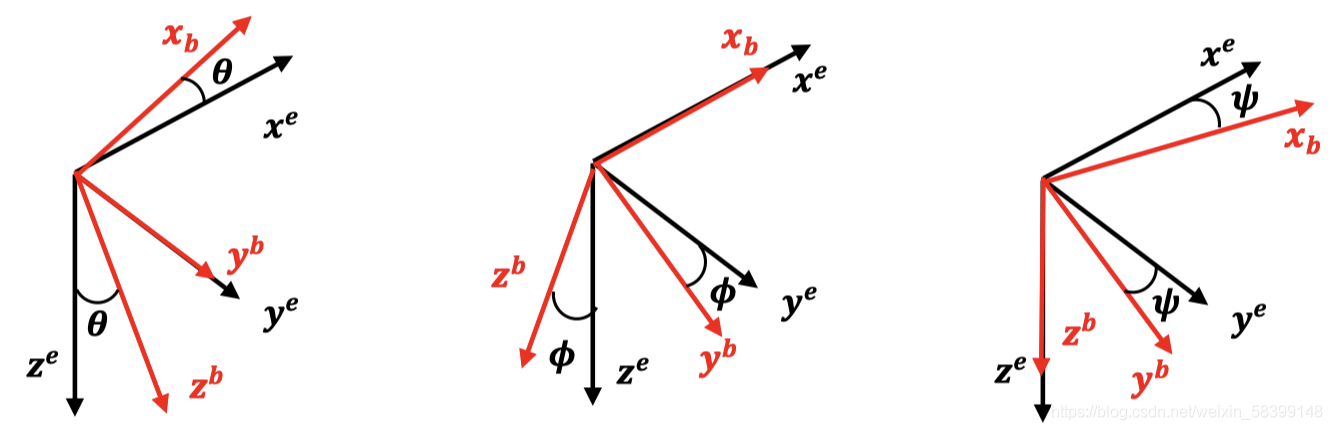
基本假设
为了研究方便,作出以下假设:
四旋翼为刚体;
四旋翼几何中心处于其重心;
只有螺旋桨的拉力T TT和重力G 作用于四旋翼,且拉力T 垂直于四旋翼的几何平面,重力G 指向地心;
四旋翼的转动惯量和质量不变;
呈对角线分布的两个螺旋桨转动方向相同;
忽略空气阻力。
转换矩阵
为研究四旋翼,需要建立坐标系。但随之而来的问题是,应该相对于什么建立坐标系。可以相对四旋翼本身建立坐标系,这种坐标系便于研究四旋翼的俯仰、滚转、偏航角,但显然无法得知四旋翼在具体空间中的位置坐标;亦可以相对地球建立坐标系,该坐标系便于得知四旋翼的位置信息,但其角度信息比较难以求解。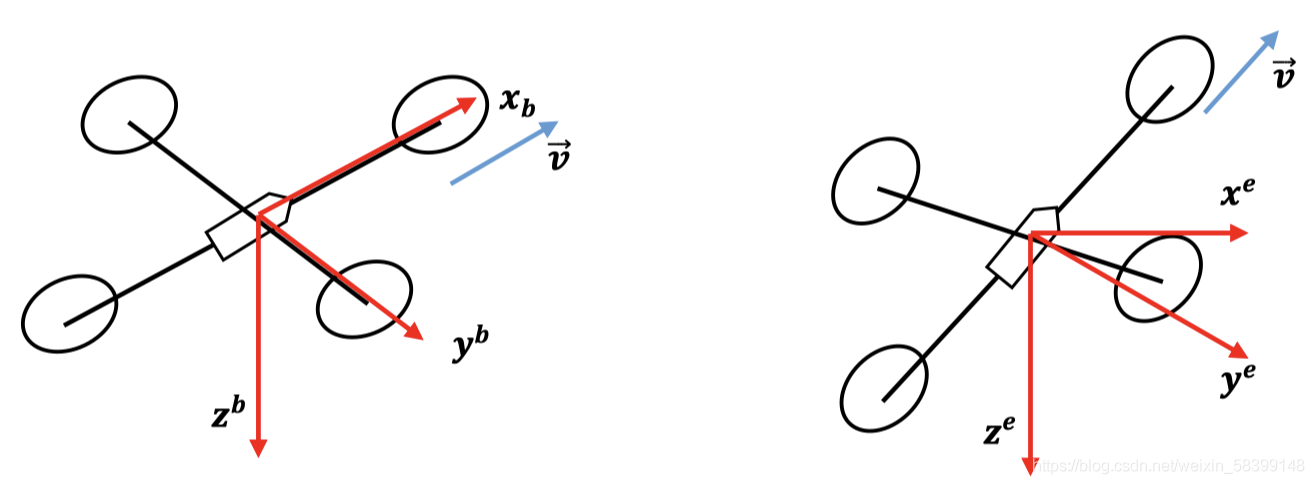









评论(0)
您还未登录,请登录后发表或查看评论