

1 灵敏度函数的定义
反映参数a的变换对函数f的影响程度,即
2 系统变化的灵敏度函数
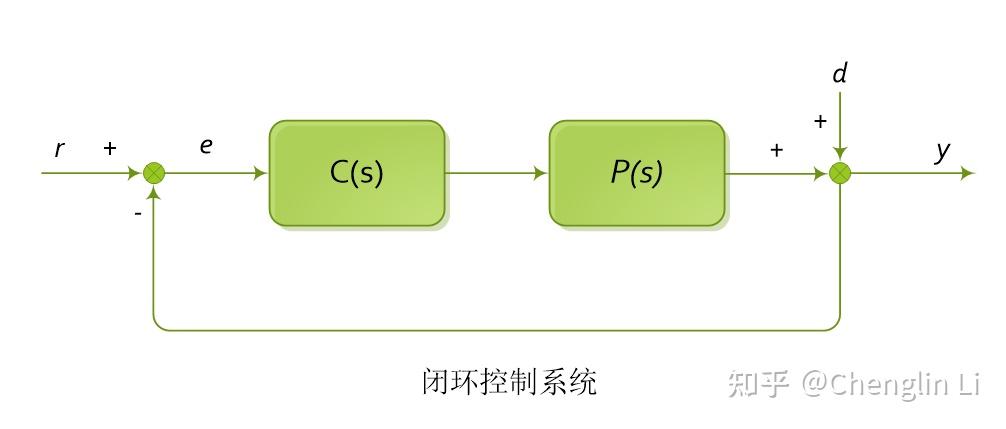
当d=0时,外部输入r到输出y的闭环传递函数为
把P(s)当作变化参数,那么T(s)对P(s)变化的灵敏度函数S为
- 在d=0时,闭环控制系统由r到e的传递函数等于灵敏度函数S。
- 在r=0时,闭环控制系统由d到y的传递函数等于灵敏度函数S。
T(s)称为补灵敏度函数。
- 为了抑制扰动信号d对输出y的影响,要求灵敏度函数S越小越好;
- 为了保证控制系统鲁棒稳定性,要求补灵敏度函数T越小越好;
(1)R=0, d->y, 灵敏度函数S;
(2)d=0, R->y, 补灵敏度函数T;
3 最小灵敏度问题
寻找控制器k,镇定P,而且使得灵敏度函数S最小,即
4 混合灵敏度
要求灵敏度函数S和补灵敏度函数T的选择,折中处理。考虑寻找满足下列条件的控制器
进一步可以写成

其中灵敏度加权函数W1,补灵敏度加权函数W2。
此时的广义控制对象G为
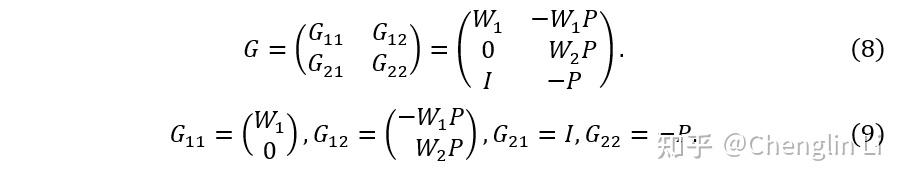
混合灵敏度问题:
寻找控制器K,镇定G, 而且使得
5 加权函数的选择
(1)灵敏度决定了系统跟踪误差的大小,越低越好;
(2)补灵敏度决定了系统的鲁棒稳定性,制约了输出信号的大小,降低补灵敏度(提高补灵敏度)会使系统输出更加稳定,二者相互矛盾,需要折中处理;
(3)在保证设计要求的前提下,尽量选择低阶加权函数,获得较为简单的低阶控制器;
(4)一般选择一阶函数;
(5)由于外界干扰主要发生在低频段,所以灵敏度加权函数W1的增益值在低频段应该尽量大,高频段无要求;
(6)补灵敏度加权函数W2具有高通滤波性,W2的截止频率高于W1的截止频率,W32一经选定,就不再改变;

(7)选取函数
- 对于灵敏度函数权重W1--小于控制带宽,高频增益小
- Low-frequency gain of about 30 dB (33 in absolute units)-低频增益
- 0 dB crossover at about 5 rad/s.-截止频率
- High-frequency gain of about –6 dB (0.5 in absolute units)-高频增益
W1 = makeweight(33,5,0.5);
- 对于补灵敏度函数权重W2--大于控制带宽,高频增益大
W2 = makeweight(0.5,20,20);
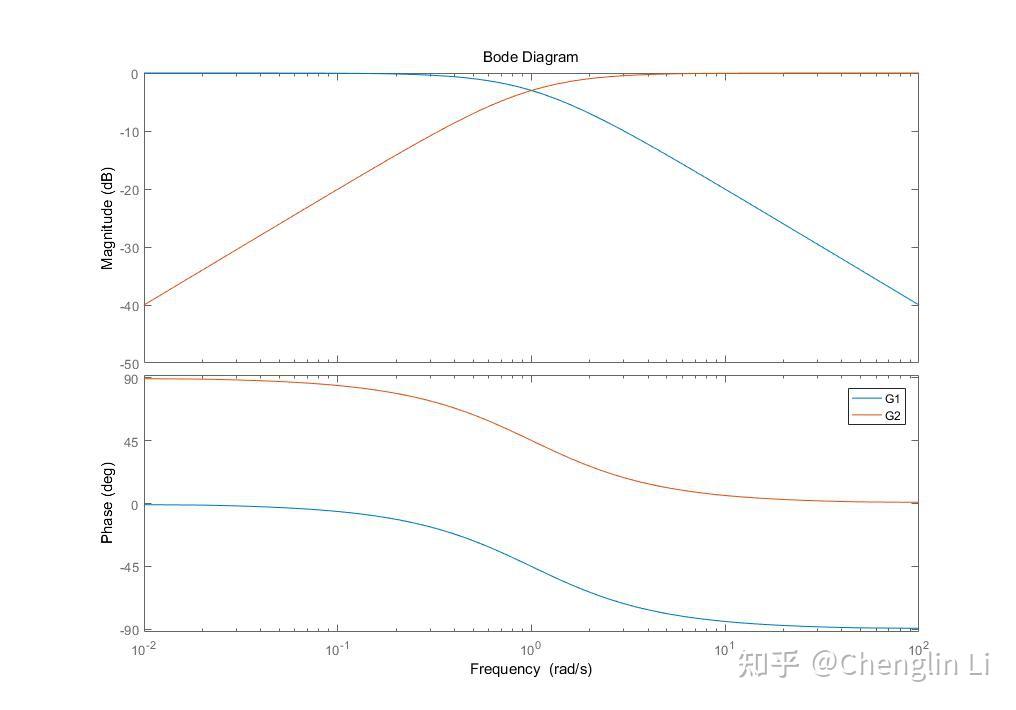
- 绘制bode图
bodemag(W1,W2)
yline(0,'--');
legend('W1','W2','0 dB')
grid on
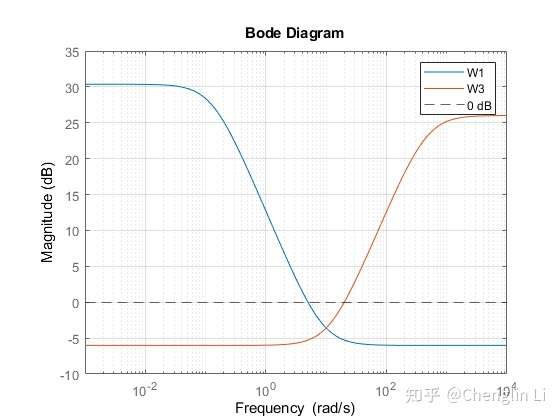
(8)因为S + T = I,所以mixsyn不能在相同的频率范围内使S和T都变小(小于0 dB)。 因此,当指定权重时,必须有一个频带宽度d,其中W1和W3都低于0 dB。
- 频带宽度d越大,调节时间越长,响应速度越慢;
- S增益越大,稳态误差越小;
使用mixsyn来计算具有这些权重的最佳混合灵敏度控制器。 对于此示例,通过将W2设置为[],不会对控制器的工作造成任何影响。
[K,CL,gamma] = mixsyn(G,W1,[],W3);
gamma如果所得的gamma值(即所有频率上的奇异峰值)均远低于1,表明闭环系统符合设计要求。
(9)选择示例
——2021.04.04——




评论(0)
您还未登录,请登录后发表或查看评论