

1. Spirit40机器人是啥
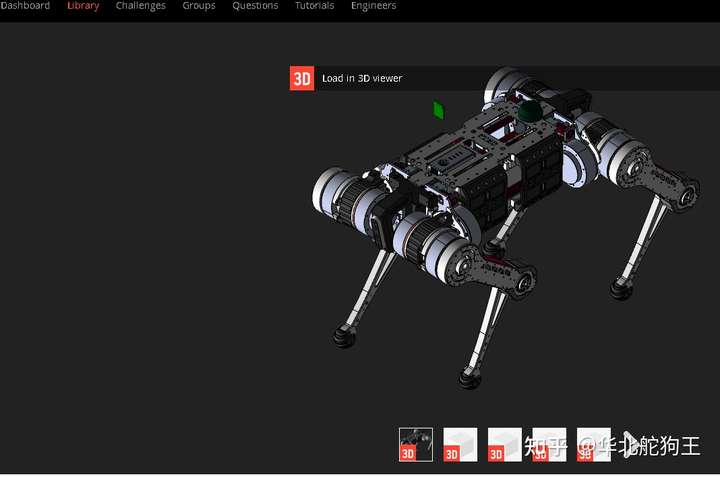
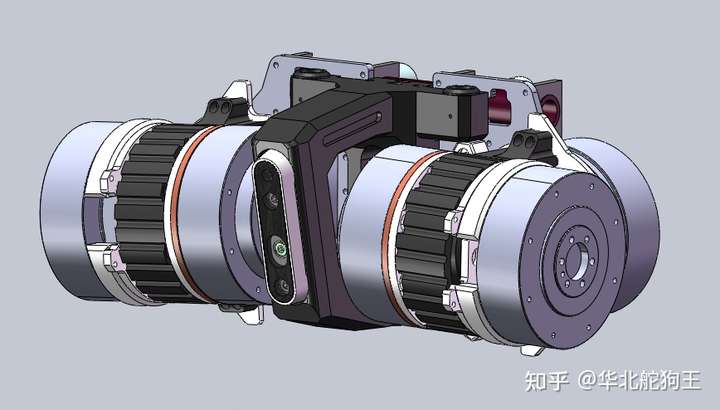
Spirit40是由美国军事四足机器人公司Ghost Robotics设计并生产的轻小型高性能四足机器人平台,其设计参考了MIT Mini Cheetha的方案,采用电机背靠背的方式布置,膝关节皮带传动,但是输出轴平移从而可以实现360°的旋转,因此其也实现了MIT小狗无法实现的正反两面行走能力,大大增强了自己的自恢复能力:


Spirit40除了具有上述特点外,还保留了Vision60优异的步态运动能力,可以实现小跑和稳定的Flying Trot步态,当然也可以看出其前身就是Kod Lab的Minitaur:

基于该机器人可以运行之前超牛的Quadruped SDK项目
2. 开源Vision40机器人机械结构
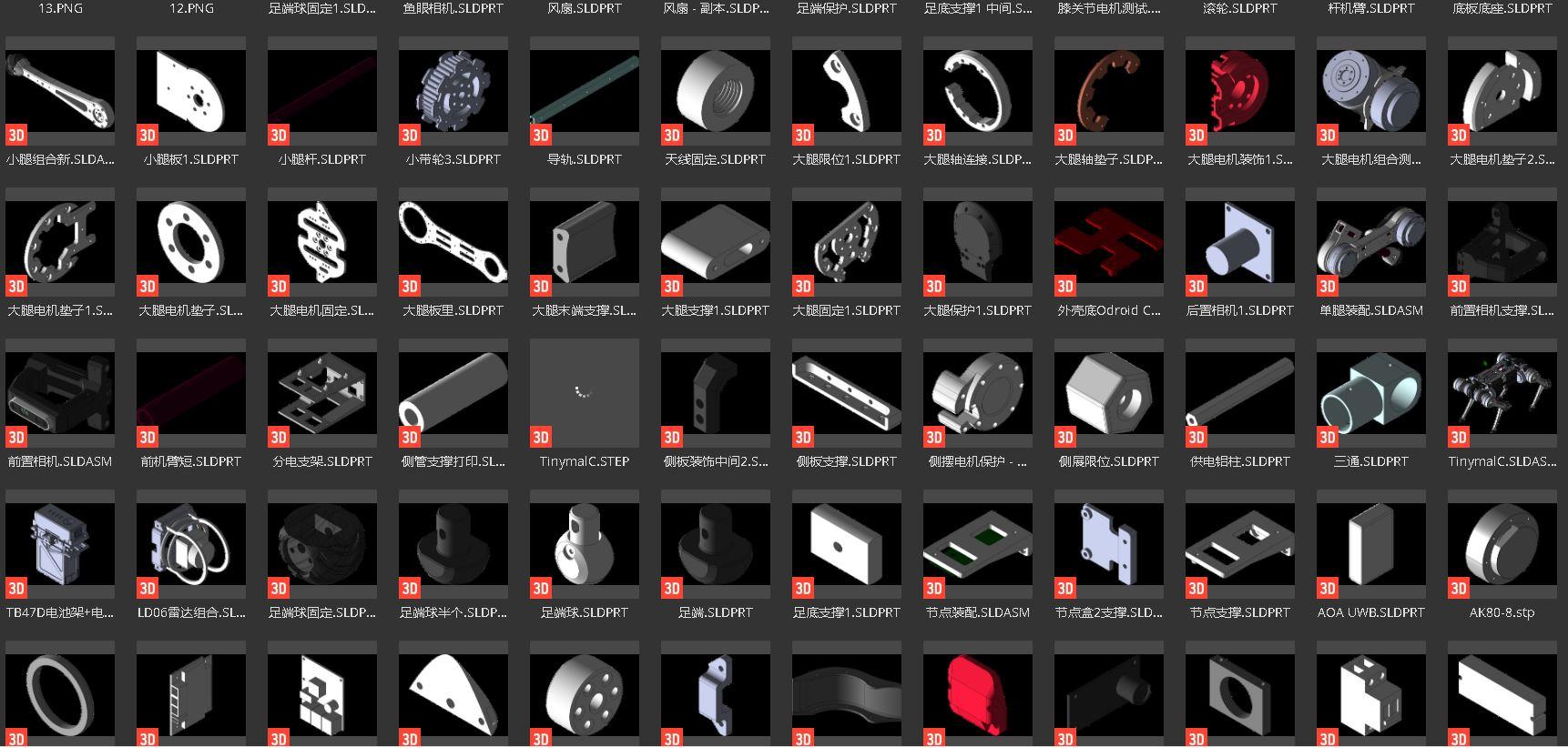
由莲动力LIT-Dynamics和Tinymal RC机器人联合设计的Vision40机器人保留Spirit40主要特征,由于Spirit40仅有少量的视频资料,因此是完全进行重新的设计,并基于3D打印与碳纤维切割就可以完成组装与加工,视频资料【开源】我自制了一个GhostRobotics的四足机器人_哔哩哔哩_bilibili:
整个机械机构我们开源在了:
项目文件中还包括了丰富的模组和其他机械模块:
相应的组装与测试视频为:

注:目前发现有人盗用开源图纸在沐风网收费且标注原创
3. 其他软件资料
Vision40采用了LIT Dynamics的硬件控制方案,同时将路由器、控制器与JetsonNano合成了一个模块:

相关材料可以查看之前的开源主控、开源MOCO-ML四足机器人:
同时之前开源了一个采用ESP32搭建的简单手持操控终端,其可以用于适配调试Vision40机器人:


4. 改进需求
目前Vision40机器人的机械部分还存在很多问题,诸如强度不够、电机震动等问题,也欢迎感兴趣、专业机械设计领域的人士机械修改并反馈给我们:

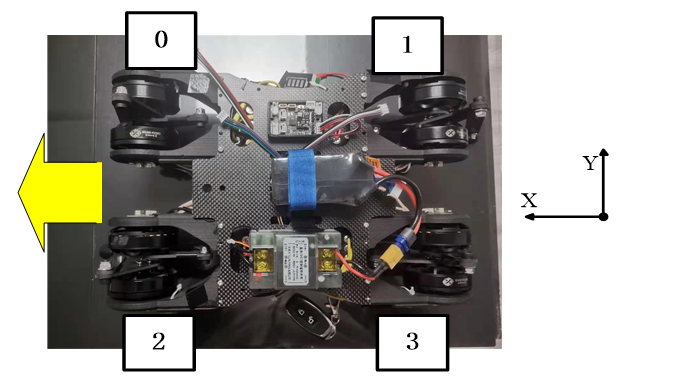
由【LIT-Dynamics莲动力】联合【Tinymal RC机器人世界】耗时2个月,参考Ghost Robotics Spirit40 少有的影像资料完成了对其机械结构复刻,非机械专业,问题有很多,整个机器人采用3D打印和切割组装完成,欢迎对机械设计 感兴趣的同学帮助优化!
相关参数: 自重:13kg
续航:1小时
站立高度:0.4m~0.6m
传动方式:膝关节皮带传动(15mm宽 630mm长)
搭载系统:ODroid+JetsonNano
无线通信:2.4G Wifi
标配电机:AK80-8 *12(推荐供电线直接焊接)
动力电机:6S 5200mAh DJI智能电池



评论(0)
您还未登录,请登录后发表或查看评论