

文章目录
- 前言
- 过程通道
-
- 模拟量输入通道
- 模拟量输出通道
- 开关量输入/输出通道
- 小结
- 模拟信号的调理
-
- 信号放大电路
- 滤波限幅电路
- 开关量信号调理
-
- 信号转换电路
- 滤波电路
- 保护电路
- 触点消抖
- 光耦隔离
- 开关量输出驱动
-
- 小功率驱动电路:
- 中功率驱动电路
- 总结
前言
前面使用计算机控制技术简单分析了控制规律,今天接着记录一下有关过程通道的内容,参考书籍还是计算控制技术与应用(第二版)。
过程通道
在整个智能车控制系统中有着多个控制环节和自动控制系统,各系统中各个环节之间的信号既有模拟信号又有数字信号,这些信号的传输和转换都需要经过其特殊的输入输出通道。
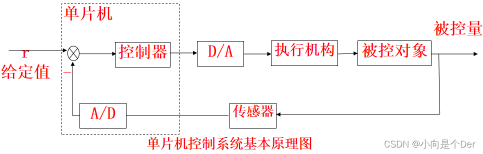
过程(输入输出)通道:是单片机和智能车控制过程中各个环节相互交换信息的桥梁。
过程输入通道:把被控对象的被控参数转换成计算机可以接收的数字信号;
过程输出通道:把计算机输出的控制命令和数据,转换成可以对被控对象进行控制的信号。
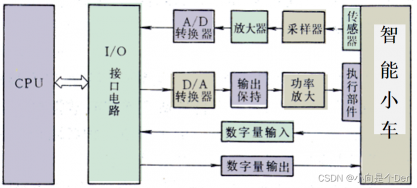
根据过程信息的性质及传递方向,过程输入输出通道分类如下:
模拟量输入通道
生产过程的参数(如小车运行过程中的速度、位移、电流、电压等)一般是随时间连续变化的模拟量,通过检测元件或变送器(如电感、运放、摄像头)将其转换为对应的模拟电压或电流,并转化为数字信号的过程。
模拟量输出通道
把微机输出的数字控制信号转换为模拟信号(电压或电流)并传输给被控对象的过程;例如·舵机和电机控制中的电机驱动和舵机内部的驱动电路。
开关量输入/输出通道
数字量(开关量)输入通道:拾起或检测反映生产过程或设备工况的开关信号(如干簧管、按纽等)、脉冲信号(如速度、位移、脉冲等)并传输给微机的过程。
数字量(开关量)输出通道:将数字信号从微机传输给那些接受数字信号的执行机构和显示、指示装置的过程。
小结
有关过程通道的概念以及其与智能车的对应关系就介绍到这,每一类过程通道都有其常用的器件和电路,这里不再一一介绍,需要了解的同学自己去查阅有关书籍。接下来重点以智能车为主体介绍一些模拟信号与数字信号的调理电路及器件。
模拟信号的调理
模拟信号调理电路常见的有:电桥电路、信号放大电路、滤波和限幅电路、共模电压与隔离技术,在智能车系统中,我们主要应用的是信号放大电路、滤波限幅电路。
信号调理电路的设计主要是根据传感器输出的信号、变送器输出的信号及A/D转换器的具体情况而有所不同,主要作用是:
1.将系统中原有的电压信号标准化;
2.将电流信号转化为电压信号;
3.非电压信号转化为电压信号;
4.噪音信号的抑制;
在智能车系统中,作为模拟量输入的一般是电磁组中由电感和匹配电容组成的谐振选频电路感应产生的电压信号,通过测量我们可以发现这个原始的感应信号很小,而且感应电压是一个交流信号,单片机内部的ADC采集模块无法采集和处理此类信号,所以就需要进行模拟信号的调理,通过这样一个调理过程,可以使得原本的交流小信号,经过检波,放大后得到一个直流电压信号,这样就可以使用单片机内部的ADC进行采样和处理了。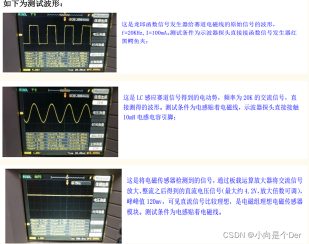
信号放大电路
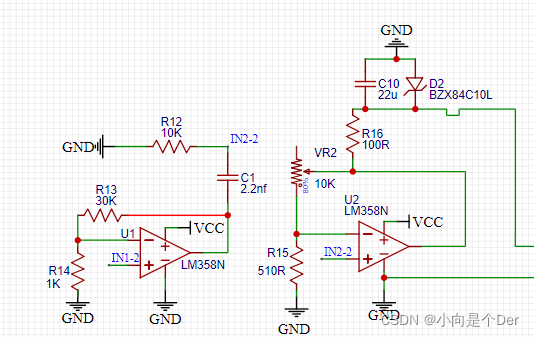
信号放大常用方法有三极管和运算放大器,在电磁信号处理上一般选择运算放大器,其本质上是一个高增益的负反馈直流放大器。加上外部反馈网络可以实现加、减、乘、除、微分和积分等数学运算,还可以与其它外设电路组成测试系统中常用的差动放大器、电桥放大器、电荷放大器、压频变换器、有源滤波器以及交流放大器等测试装置。
智能车系统电磁信号的处理过程中运算放大器完成了对LC谐振信号的检波,以及放大最后使得电磁信号变成了单片机能够处理的信号。有关这个电磁及运放模块的详细描述可以去查看硬件篇电感部分的介绍。
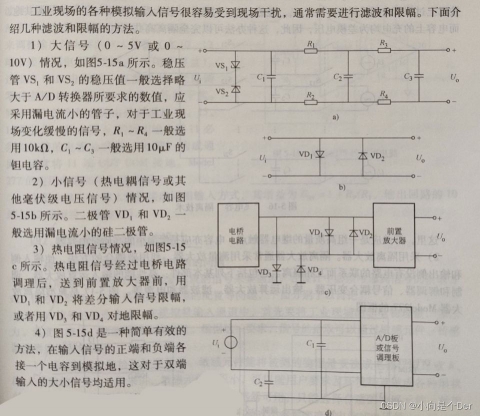
滤波限幅电路
开关量信号调理
开关量输入通道的功能就是接收外部的状态信号,这些信号是以逻辑值0或者1出现,具体的表现形式可能是电压、电流或者开关的触点。在有些情况下外部输入的信号可能会引起瞬间的高电压、过电压、接触式抖动以及早上等干扰,为了保证输入信号的稳定性需要将输入的状态信号进行转换、保护、滤波、隔离等措施转换成计算机能接收的逻辑信号,这个过程就是开关量信号调理的任务。
常用的调理方法:
信号转换电路
对于电压输入,V1>某一值,为逻辑1
对于电流输入, I > 某一值,为逻辑1
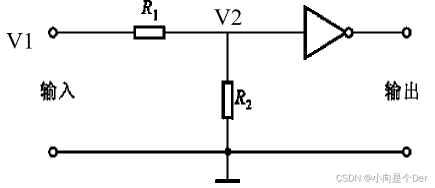
电压输入型:
如果是电压输入,R1和R2电阻分压,使得V2符合TTL逻辑规范

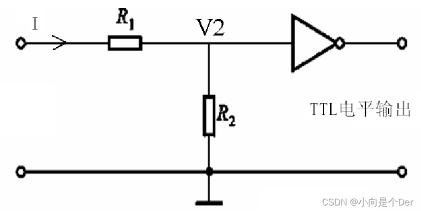
电流输入型:如果是电流输入,I在电阻R2上的压降符合TTL逻辑规范
对于开关输入,S断开,V2=5V,为逻辑“1”
S闭合,V2=0V,为逻辑“0”
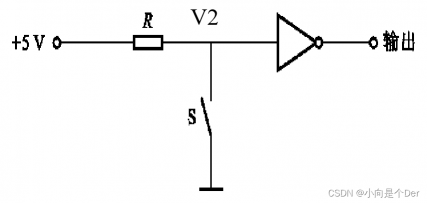
R地阻值可在4.7KΩ~100KΩ之间选取。例如智能车主板上的按键就是使用了类似的转换原理。

滤波电路
由于长线传输电路,空间等干扰因素的原因,输入信号常常夹杂着各种干扰信号,这些干扰信号有时可能会使读入信号出错,这就需要滤波电路来消除干扰,例如下图所示的一个RC低通滤波电路(相当于积分电路),信号能够通过电感的滤波器、或者通过电容连接到地的滤波器对于低频信号的衰减要比高频信号小,称为低通滤波器。
该电路会使得输出信号与输入信号直接有一个延迟,延迟时间常数t由RC参数决定,截止频率为f = 1 / (2 π R C)。
低通滤波器原理: 利用电容通高频阻低频、电感通低频阻高频的原理。对于需要截止的高频,利用电容吸收、阻碍的方法不使它通过;对于需要放行的低频,利用电容高阻、电感低阻的特点让它通过。有关常见的低通滤波器参考此文。
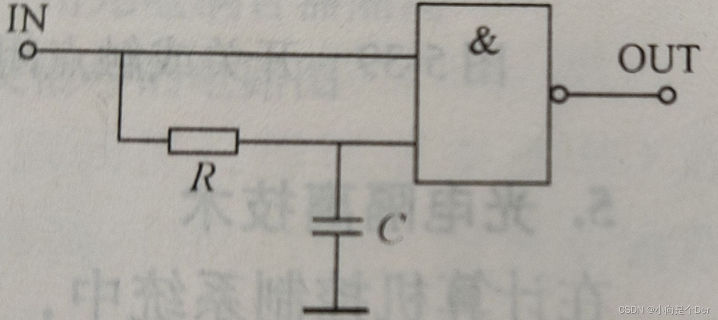
智能车中类似下图所示采用的就是RC的高通滤波。

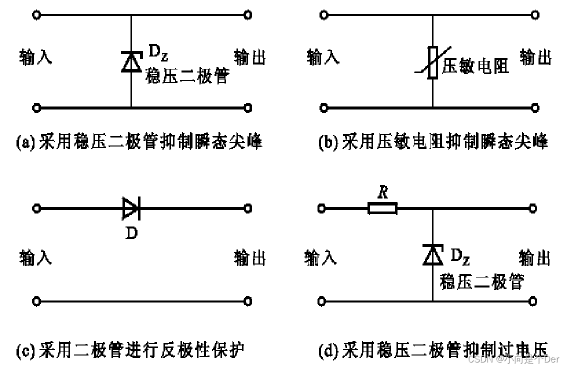
保护电路
在整个系统运行的过程中可能会出现一些意外的过电压过电流现象,甚至是反冲,这都会影响系统的输入,甚至可能会因此损坏主控以及元器件。
常用输入保护电路:
触点消抖
若开关量输入信号来自机械式开关或者继电器触电,由于机械弹性作用的影响,通常伴随有一定时间的触点机械抖动,然后其触点才稳定下来。抖动时间的长短与开关的机械特性有关,一般为5-10 ms。
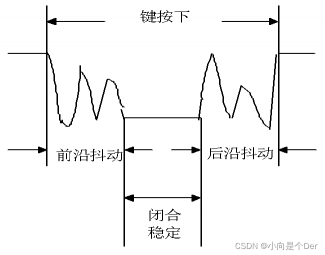
未消抖按键按下时主控采集到的信号序列如下所示:

显然抖动过程会影响到我们的系统判断,这里就需要进行消抖,消抖方法大致分为两类:软件消抖(常见的有延时,也有采用状态机来判断的)和硬件消抖。硬件消抖可以采用在按键两端并联一个电容来吸收抖动产生的干扰。

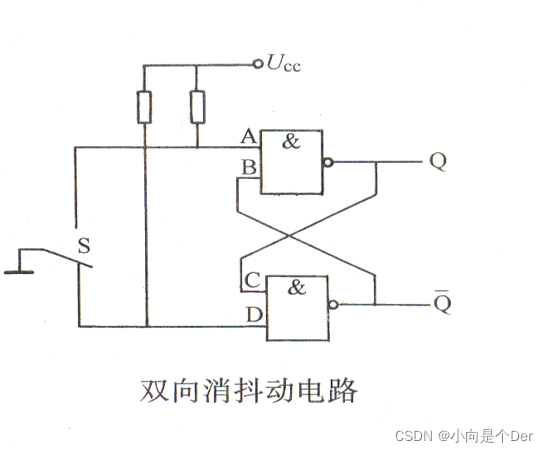
也可以采用RS触发器实现双向消抖,当抖动的第一个脉冲信号使得RS触发器翻转时,D端处于高电平状态,过第一个脉冲消失后RS触发器仍保持原来状态,以后的抖动所引起的数个脉冲对RS触发器的状态无影响,从而实现消抖。
消抖主要是对于按键和拨码开关这一类器件而言,为了减少电路设计的难度,一般采用软件消抖的方法来处理。
光耦隔离
当计算机控制系统的开关量输出信号用于控制较大功率的设备时,为防止现场设备上的强电磁干扰或高电压通过输出控制通道进入计算机系统,一般需要采取光电隔离措施隔离现场设备和计算机系统。
在智能车系统中,隔离技术一般应用在电机控制以及舵机控制,采用高速光耦使得主控得到保护,避免因为反冲导致主控的损坏。
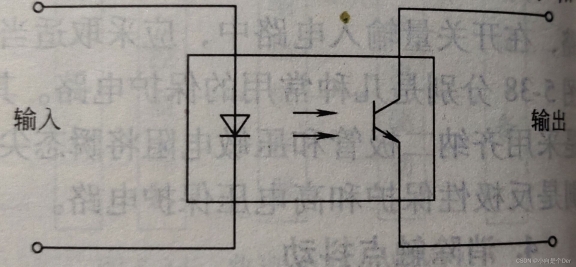
光电耦合器由发光元器件和光接收两部分组成,输入信号驱动内部发光二极管产生光信号,光信号作用于光电二极管的基极,使得光电晶体管受光导通,这样,通过电-光-电的转换,使得输入信号转换成了输出信号,而且输入端与输出端在电气上没有连接,被隔离开了。
光耦隔离在智能车电机驱动中的应用:

开关量输出驱动
在整个控制系统中,往往需要开关输出量具有一定的驱动能力用来控制一些外设,常用驱动电路如下:
小功率驱动电路:
这类电路一般用于驱动发光二极管、LED显示器、小功率继电器等元器件,驱动能力一般在10mA~40mA;智能车中大多是驱动LED,类似电路如下图所示:
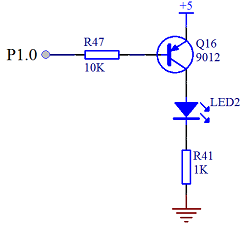
其中如果β=100,可以计算R47的最大值是143K。
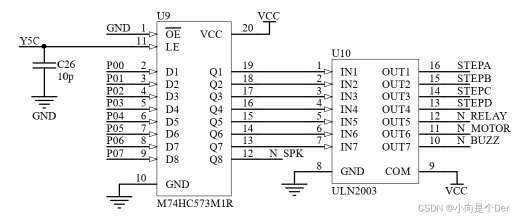
中功率驱动电路
这类电路常用于驱动继电器、电磁开关等中功率装置,一般要求具有50~500mA的驱动能力,可以采用达林顿管或者中功率晶体管来驱动。在智能车中机会没有使用到,但是蓝桥杯输出端中有使用,如下图ULN2003。
总结
有关过程通道的记录就到这,此文主要目的是给初入门的参赛者一个基础知识面的梳理,没有具体到实际的电路和系统,具体到电路中还有很多技术参数的计算,主要涉及电路、模电的知识,有关芯片的使用还涉及数电的相关知识,希望大家能够更多的去深入了解下整个系统构成,具体去算一算实际参数,去仿真或者做实物利用示波器这些工具分析各个模块的工作流程和原理。之前几篇文章中的相关资料已经上传值我的资源中,基本都是0积分下载的,没有VIP的可以私信博主。
此系列旨在帮助初级参赛者梳理知识,不做他用,很多资源来自网络,如有侵权,联系删除。



评论(0)
您还未登录,请登录后发表或查看评论