
PID控制器模拟器
概述:
PID控制器是一种常用的反馈控制算法,用于实现系统输出与期望值之间的精确调节。PID控制器模拟器是一个工具,可以模拟和测试PID控制器的性能,并对系统进行调整和优化。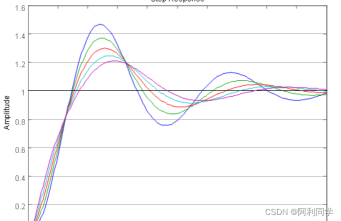
输入参数:
- setpoint:期望值或目标值
- process_variable:过程变量或实际测量值
- Kp:比例增益系数,用于调整控制器对误差的响应程度
- Ki:积分增益系数,用于修正系统静态误差
- Kd:微分增益系数,用于抑制系统振荡和快速响应
返回值:
- output:PID控制器的输出,用于调整系统的控制信号
工作原理:
PID控制器根据当前的误差(设定值与实际值之间的差异)计算输出,该输出通过调整系统控制信号来使误差最小化。它综合考虑了比例、积分和微分三个方面的控制行为。
- 比例(Proportional):根据误差的大小进行调节。比例增益系数Kp决定了响应的灵敏度,较大的Kp会导致更快的响应但可能引起系统振荡。
- 积分(Integral):积分增益系数Ki用于修正系统的静态误差,即持续存在的偏差。它通过累积历史误差来调整输出,以减小偏差。
- 微分(Derivative):微分增益系数Kd用于抑制系统的振荡和快速响应。它通过考虑误差变化率来预测未来趋势,并相应地调整输出。
PID控制器模拟器根据输入的设定值和实际值,以及给定的Kp、Ki和Kd参数,计算PID控制器的输出。输出可以用于调整系统的控制信号,从而实现期望的控制效果。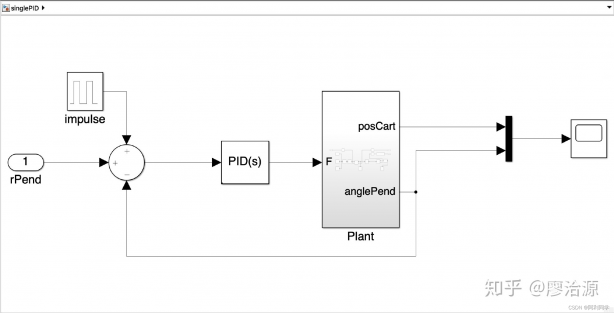
注意:
PID控制器模拟器是一个理论工具,需要正确设置参数才能获得最佳的控制效果。在实际应用中,还需要进行实时调整和优化,根据系统的动态特性对参数进行精细调节。这涉及到系统建模、实验测试和闭环反馈调试等过程。
程序代码
点击原链接订阅后发博主:PID Controller Simulator获取
程序效果
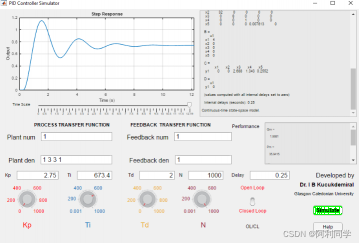
为了运行该程序,用户必须拥有MATLAB R2017a或更高版本,并安装Control Systems Toolbox。该应用程序要求通过定义分子和分母多项式的系数来定义系统的传递函数。在这个新版本中,还可以考虑系统的输入延迟和反馈传递函数。
需要注意的是,在使用该程序之前,用户需要确保已安装了所需的MATLAB版本,并且已安装了Control Systems Toolbox。此外,用户还需要提供系统的传递函数多项式的系数、输入延迟和反馈传递函数,以便正确运行程序并获得所需的结果。
PID仿真模型搭建
PID控制器(Proportional-Integral-Derivative Controller)是一种经典的反馈控制算法,被广泛应用于工业自动化系统中。它基于当前误差、历史误差以及误差变化率,通过比例、积分和微分三个环节来调节控制信号,实现对系统输出的精确控制。在本文中,我将详细阐述PID控制的原理以及仿真流程。
-
比例环节(Proportional):比例控制根据当前误差进行调节,其输出与误差成正比。比例系数Kp决定了比例控制对误差的响应程度,调节Kp可以改变系统的灵敏度。较大的Kp值会导致更快的响应速度,但可能引发系统的振荡和不稳定。
-
积分环节(Integral):积分控制用于修正系统的静态误差,即持续存在的偏差。它通过累积历史误差来调整输出,以减小偏差。积分系数Ki决定了积分控制的增益,过大的Ki值可能导致系统响应过度调整或产生超调。
-
微分环节(Derivative):微分控制通过考虑误差变化率来预测未来趋势,并相应地调整输出。微分控制可抑制系统的振荡和快速响应,减少超调。微分系数Kd决定了微分控制的增益,过大的Kd值可能导致系统对噪声和干扰过于敏感。
-
PID控制器输出计算公式:
[
u(t) = Kp \cdot e(t) + Ki \cdot \int_{0}^{t}e(\tau)d\tau + Kd \cdot \frac{de(t)}{dt}
]
其中,u(t)为PID控制器的输出,e(t)为当前误差,Ki为积分系数,Kd为微分系数。上述公式包括了比例、积分和微分三个环节。 -
PID控制器的优点:
- 简单易实现,适用于大多数控制问题。
- 可以根据需求调节参数以获得期望的控制性能。
- 对线性和非线性系统都具有良好的适应性。
- 具有较好的稳定性和鲁棒性。
PID控制器的仿真流程:
-
确定系统模型:首先,需要建立被控对象(Plant)的数学模型。这可以通过系统的传递函数或状态空间模型来描述。
-
设定目标:确定系统的期望输出,即设定值(Setpoint)。这代表了我们希望系统达到的目标状态。
-
选择控制策略:基于系统的动态特性和设计要求,选择PID控制器作为控制策略。确定PID控制器的参数Kp、Ki和Kd,并进行初步估计。
-
设置仿真环境:在MATLAB中,通过建立模型或定义传递函数,设置仿真环境。可以利用Simulink工具箱创建闭环控制系统,包括被控对象、PID控制器和反馈环节。
-
运行仿真:在仿真环境中,将设定值输入到系统中,并根据PID控制器的输出进行调节。观察系统的响应,可以通过绘制输出响应曲线来评估控制效果。
-
调节参数:根据实际仿真结果,根据系统的动态特性进行参数调节。可以使用试错法或先进的自动调参算法来寻找最佳的PID参数组合。
-
评估性能:在不同的工况下,评估PID控制器的性能,包括稳态误差、调节时间、超调量和振荡等指标。根据需要对PID参数进行优化,以达到更好的控制效果。
-
实时实施:将经过仿真和调试优化的PID参数实时应用于实际的控制系统中,并进行实地测试和反馈。
总结:
PID控制器是一种经典且实用的控制算法,适用于各种控制问题。通过合理选择PID参数和仿真调试,可以实现系统输出与期望值之间的精确控制。仿真流程的使用能够帮助我们更好地理解控制系统的动态特性,并优化PID控制器的性能。



评论(0)
您还未登录,请登录后发表或查看评论