


简述四种干扰观测器(二):基于非线性观测器的干扰观测器
开启干扰观测器系列,这个系列将简述四种常用的干扰观测器的原理以及应用场景。
分别为:
1基于名义逆模型的干扰观测器;
2基于非线性观测器的干扰观测器;
3基于状态观测器的干扰观测器;
4基于扩张状态观测器的干扰观测器。
大家可以根据系统本身的特性来选择最适用的观测器。
本篇介绍的基于非线性观测器的干扰观测器,是依据陈文华老师2000年的论文来构造阐述的(注1),是一种非常简单有效的干扰观测器。
先介绍原理,最后讲如何简化应用。
假设系统的模型如下,T是力矩,d是干扰力矩,J()和G(),均是非线性函数。

构造干扰观测器的方程如下:

假设

定义干扰观测的误差为:

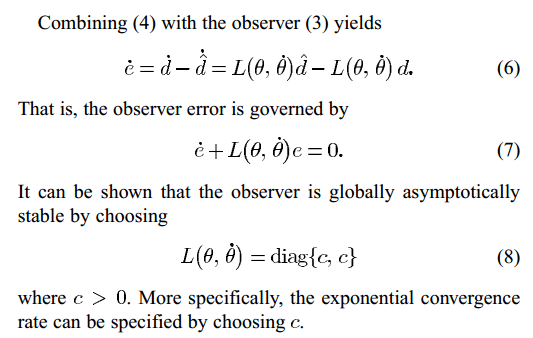
L定义为对角阵,c为观测器的收敛极点。
定义一个新的变量z;
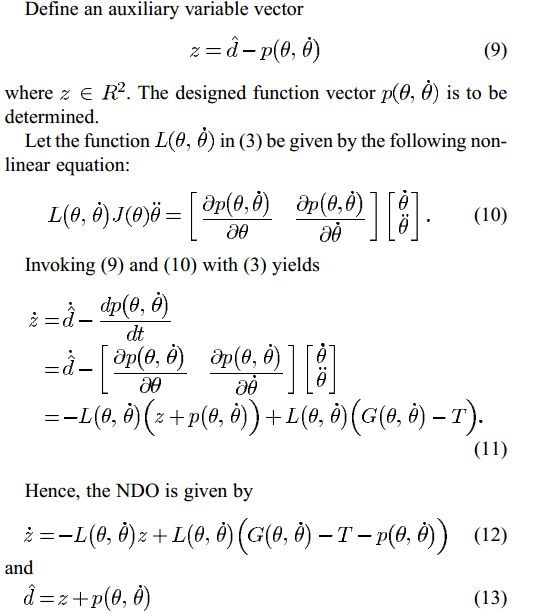
通过不断计算公式12,可得出z的估计值,因此干扰的估计值可以通过公式13来计算出来。公式12和公式13即是干扰观测器的方程。
L()可设置为对角阵,p()由公式10给出。
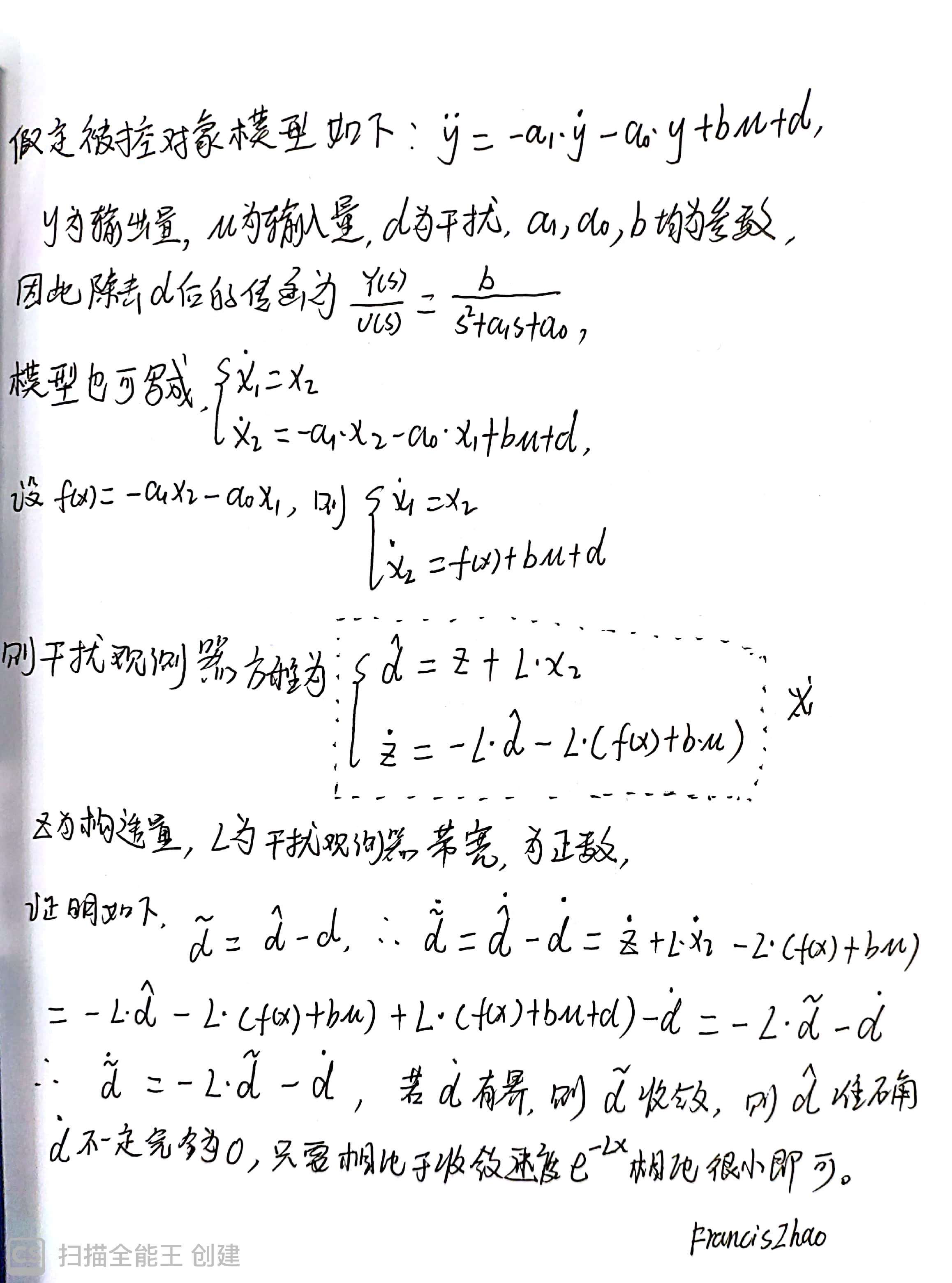
原理介绍完,你可能觉得一头雾水,下面介绍如何在最通用的二阶线性模型中应用,即可豁然开朗了。
以被控对象为最普遍的二阶模型为例,下面介绍如果构建简单的一阶干扰观测器。模板都在,应用时仅仅需要变换参数,设置带宽L即可。原谅我懒得打公式。。。
总结:
1这种观测器的最大优势既是简单好用。
2如果被控对象的参数不准确也没有关系,这样估计的干扰就包含参数不准确项了。
3 带有干扰观测器的控制器最好不用积分控制,因为积分也是抗干扰的,二者容易重叠导致控制器超调,可以用P或者PD控制。
4 这种干扰观测器可以应用非线性的被控对象,但是我给出的模板是二阶线性的,因为这种被控模型在运动控制中最为常见。
5 模板中的观测器带宽L最好是控制器带宽的3-5倍。
6 上篇中基于名义逆模型的干扰观测器很难应用在非线性系统中。
7 大神
提示,这种观测器在不容易获得输出量的导数时,并不方便,比如电机控制的速度环中,不好获得加速度信息。但是在存在陀螺仪的控制系统中,角度角速度都容易获得,比如无人机或者卫星控制,就比较好用了。
注1:
注2:

欢迎指正讨论,转载请注明,认同请点赞。
为什么那么多人都是只收藏不点赞不评论啊!
麻烦大家给我一个反馈



评论(0)
您还未登录,请登录后发表或查看评论