

1.车辆横摆动力学模型简化
车辆横摆动力学模型是无人驾驶车辆路径跟踪控制中常用的模型之一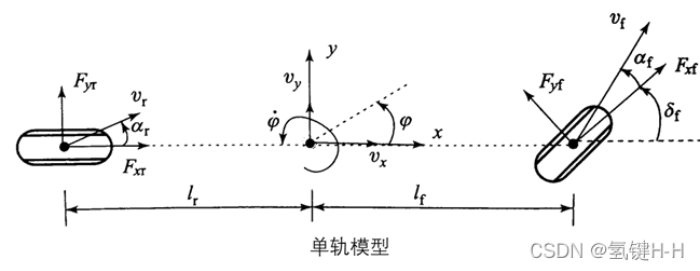
但是在 《车辆运动控制(2)车辆横摆动力学建模》 中根据单轨模型分析得到2自由度的车辆横摆动力学微分方程: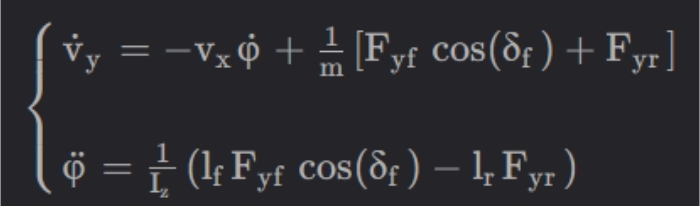
对于模型预测控制器的设计来说还是过于复杂,因此需要对其进行进一步简化
1.1 小角度假设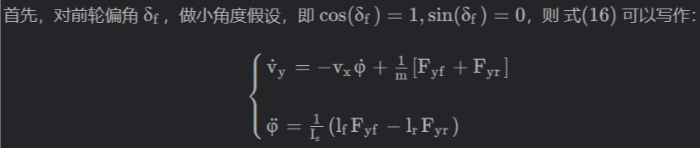
此时,式(21) 所表示的车辆动力学模型的非线性特征主要来自轮胎非线性区的轮胎力表达
可以使用《车辆运动控制(3)轮胎模型》推导的线性化轮胎模型对轮胎侧向力 式(20) 进行线性化: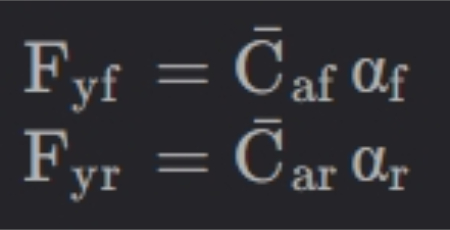
由于线性化轮胎模型只在轮胎侧偏角较小时具有较高的拟合精度
所以采用小角度假设可近似得到: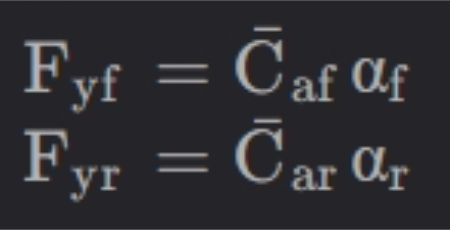

1.2 轮胎垂向载荷
对于单轨车辆模型,可以忽略轮胎的横向载荷转移,其 轮胎垂向载荷 可以表示为: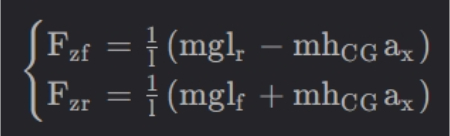

1.3 简化
结合 式( 21 ) (21)(21) ~ 式( 24 ) (24)(24) 可以得到基于前轮偏角小角度假设和线性化轮胎模型的车辆横摆动力学模型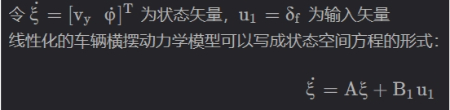
其中,


2. 考虑道路曲率
式(25) 所表示的车辆横摆动力学模型能够反映车辆的横摆特性
常被用于车辆的横摆稳定性分析
然而,此模型的不足在于没有考虑车辆的侧倾动力学特性,无法体现车辆的侧倾稳定性约束,不适用于存在复杂道路倾角的路径跟踪控制
当无人驾驶车辆进行路径跟踪时,道路曲率对其转向特性和行驶稳定性也有重要影响
直接关系到无人驾驶车辆动力学模型的准确程度
因此,当车辆横摆动力学应用于无人驾驶车辆的路径跟踪控制时
将式(11) 与 式(21) 相结合,得到考虑道路曲率的车辆横摆动力学模型: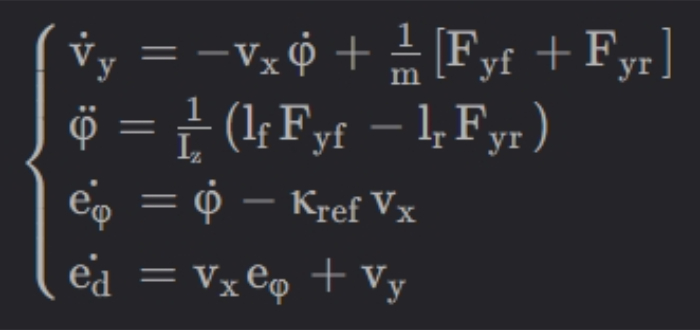
其中,Kref为由期望路径得到的参考曲率
综合式(22)、式(24)和 式(26)
其中,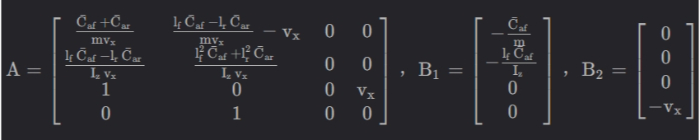

3. 考虑轮胎滑移
之前建立的车辆动力学模型假设车辆速度保持恒定
且忽略了轮胎与地面之间的滑移作用
实际上,轮胎滑移对轮胎的纵向力有明显的影响
特别是在 道路摩擦系数较低的情况 下
因此建过能够考虑轮胎滑移的车辆动力模型也是很有必要的
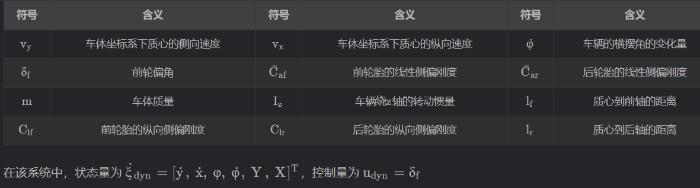
比较常用的是 基于前轮偏角较小 和 线性轮胎模型假设 的车辆动力学非线性模型
其表达式为: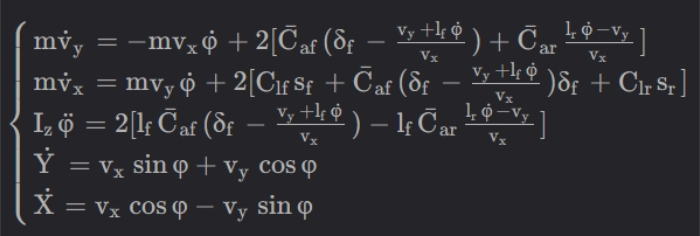



评论(0)
您还未登录,请登录后发表或查看评论