

课程目的
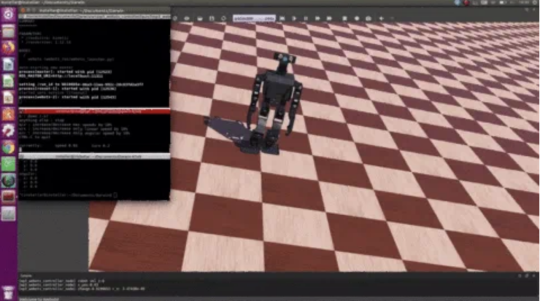
Webots是一款开源且支持多平台的机器人仿真软件,涵盖机器人建模,编程和仿真功能,具有开源免费、器件和文档丰富并且支持多操作系统和编程语言。
本课程将以Webots为物理仿真引擎,使用QtCreator作为IDE, 基于ROS实现Robotis OP3机器人的关节和步态规划控制。
你将学会以下内容:
-
搭建Webots与ROS的联合仿真环境
-
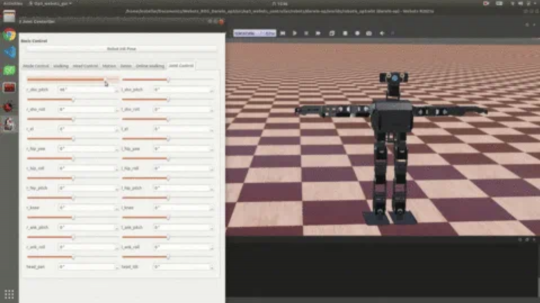
控制人形机器人关节
-
使用QT设计可视化的交互界面
-
使用multiplot展示多传感器数据
-
掌握人形机器人步态规划与控制基本原理
让你的人形机器人动起来!
课程内容
1. 课程简介
2. 仿真环境安装与简介
3. 仿真控制接口设计
4. 人形机器人步态规划
5. 人形机器人行走仿真
6. 课程总结与展望
*课程资料请在微信公众号“古月居”后台回复“仿真控制资料”获取
温馨提示
1.本课程适用于对人形机器人仿真与控制感兴趣的人群,课程也会涵盖线性倒立摆,捕捉点(Capture Point)和运动发散分量(DCM)等主流理论知识
2.本课程的仿真部分需要对ROS和Webots有入门级别了解
3.本课程的理论部分需要对控制论和微积分有入门了解
4.由于本产品的视频课程属性,观看后不予退款
购课优惠
古月居官网所获积分可以兑换优惠券哦!打开古月居官网-【我的主页】-【积分兑换】,点击兑换。


兑换成功后在【兑换记录】查看兑换码,就可以在手机端使用了,不要错过省钱机会哟~


两人拼团即可享受优惠价~
三人拼团更实惠哦!
前50名购买可领取5元优惠券
每人限领1张
优惠券有效期15天内
优惠券领取方式如下:




(扫码可领取课程优惠券)



评论(0)
您还未登录,请登录后发表或查看评论