
[INFO] [launch]: All log files can be found below /home/lidanfeng/.ros/log/2024-04-06-13-16-00-100484-lidanfeng-virtual-machine-4942
[INFO] [launch]: Default logging verbosity is set to INFO
Task exception was never retrieved
future: <Task finished name='Task-2' coro=<LaunchService._process_one_event() done, defined at /opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py:226> exception=SubstitutionFailure("executable 'cartographer_occupancy_grid_node' not found on the libexec directory '/opt/ros/foxy/lib/cartographer_ros' ")>
Traceback (most recent call last):
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py", line 228, in _process_one_event
await self.__process_event(next_event)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py", line 248, in __process_event
visit_all_entities_and_collect_futures(entity, self.__context))
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 45, in visit_all_entities_and_collect_futures
futures_to_return += visit_all_entities_and_collect_futures(sub_entity, context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 45, in visit_all_entities_and_collect_futures
futures_to_return += visit_all_entities_and_collect_futures(sub_entity, context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 45, in visit_all_entities_and_collect_futures
futures_to_return += visit_all_entities_and_collect_futures(sub_entity, context)
[Previous line repeated 1 more time]
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 38, in visit_all_entities_and_collect_futures
sub_entities = entity.visit(context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/action.py", line 108, in visit
return self.execute(context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/actions/node.py", line 453, in execute
ret = super().execute(context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 823, in execute
self.__expand_substitutions(context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 668, in __expand_substitutions
cmd = [perform_substitutions(context, x) for x in self.__cmd]
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 668, in <listcomp>
cmd = [perform_substitutions(context, x) for x in self.__cmd]
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/perform_substitutions_impl.py", line 26, in perform_substitutions
return ''.join([context.perform_substitution(sub) for sub in subs])
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/perform_substitutions_impl.py", line 26, in <listcomp>
return ''.join([context.perform_substitution(sub) for sub in subs])
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_context.py", line 232, in perform_substitution
return substitution.perform(self)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/substitutions/executable_in_package.py", line 84, in perform
raise SubstitutionFailure(
launch.substitutions.substitution_failure.SubstitutionFailure: executable 'cartographer_occupancy_grid_node' not found on the libexec directory '/opt/ros/foxy/lib/cartographer_ros'
Task exception was never retrieved
future: <Task finished name='Task-8' coro=<LaunchService._process_one_event() done, defined at /opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py:226> exception=RuntimeError('Signal event received before subprocess transport available.')>
Traceback (most recent call last):
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py", line 228, in _process_one_event
await self.__process_event(next_event)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py", line 248, in __process_event
visit_all_entities_and_collect_futures(entity, self.__context))
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 38, in visit_all_entities_and_collect_futures
sub_entities = entity.visit(context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/action.py", line 108, in visit
return self.execute(context)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/opaque_function.py", line 75, in execute
return self.__function(context, *self.__args, **self.__kwargs)
File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 443, in __on_signal_process_event
raise RuntimeError('Signal event received before subprocess transport available.')
RuntimeError: Signal event received before subprocess transport available.
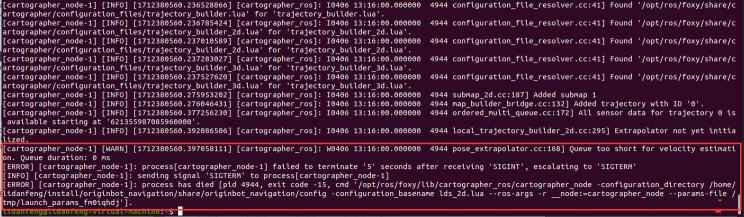
[INFO] [cartographer_node-1]: process started with pid [4944]
[cartographer_node-1] [INFO] [1712380560.233232088] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/home/lidanfeng/install/originbot_navigation/share/originbot_navigation/config/lds_2d.lua' for 'lds_2d.lua'.
[cartographer_node-1] [INFO] [1712380560.234298154] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-1] [INFO] [1712380560.235127895] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-1] [INFO] [1712380560.235604191] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-1] [INFO] [1712380560.235930978] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-1] [INFO] [1712380560.236280590] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-1] [INFO] [1712380560.236528866] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-1] [INFO] [1712380560.236785424] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-1] [INFO] [1712380560.237010589] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-1] [INFO] [1712380560.237283027] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-1] [INFO] [1712380560.237527620] [cartographer_ros]: I0406 13:16:00.000000 4944 configuration_file_resolver.cc:41] Found '/opt/ros/foxy/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-1] [INFO] [1712380560.275953202] [cartographer_ros]: I0406 13:16:00.000000 4944 submap_2d.cc:187] Added submap 1
[cartographer_node-1] [INFO] [1712380560.276046431] [cartographer_ros]: I0406 13:16:00.000000 4944 map_builder_bridge.cc:132] Added trajectory with ID '0'.
[cartographer_node-1] [INFO] [1712380560.377256230] [cartographer_ros]: I0406 13:16:00.000000 4944 ordered_multi_queue.cc:172] All sensor data for trajectory 0 is available starting at '621355987085960000'.
[cartographer_node-1] [INFO] [1712380560.392086506] [cartographer_ros]: I0406 13:16:00.000000 4944 local_trajectory_builder_2d.cc:295] Extrapolator not yet initialized.
[cartographer_node-1] [WARN] [1712380560.397058111] [cartographer_ros]: W0406 13:16:00.000000 4944 pose_extrapolator.cc:168] Queue too short for velocity estimation. Queue duration: 0 ms
[ERROR] [cartographer_node-1]: process[cartographer_node-1] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'
[INFO] [cartographer_node-1]: sending signal 'SIGTERM' to process[cartographer_node-1]
[ERROR] [cartographer_node-1]: process has died [pid 4944, exit code -15, cmd '/opt/ros/foxy/lib/cartographer_ros/cartographer_node -configuration_directory /home/lidanfeng/install/originbot_navigation/share/originbot_navigation/config -configuration_basename lds_2d.lua --ros-args -r __node:=cartographer_node --params-file /tmp/launch_params_fm0iqhdj'].



第三方账号登入
QQ 微博 微信