

前言
上一篇详细介绍了模型预测控制的算法原理,以及其在多旋翼无人机运动规划中的应用。 本篇将针对配备稀疏点云传感器(如红外、超声波、毫米波雷达、激光雷达等 )的无人机避障问题(本文中的无人机代指多旋翼无人机 )展开详细的讨论。 无人机的避障问题 在前几篇文章中,我们介绍了运动规划问题的常规解法: 前端路径搜索算法+后端轨迹优化 。 而对于无人机这样一个具体的研究对象而言,我们同样可以采用类似的方法解决该问题:
- 前端采用A */RRT *等算法
- 后端轨迹优化采用MPC/JerkLimitedTrajectory/MinimumSnap/MinumumJerk 等算法
对于本文提到的避障问题,通常根据无人机的传感器方案不同,采用不同的规划器方案。
针对稀疏点云传感器/组合传感器的避障规划器
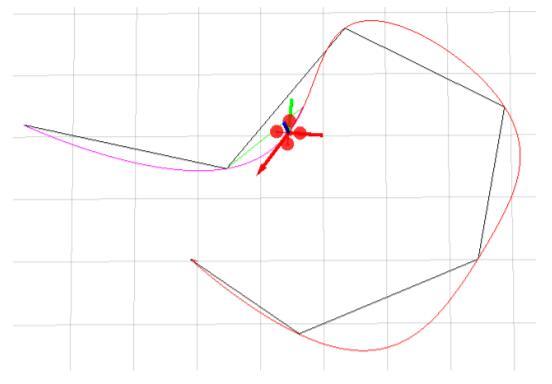
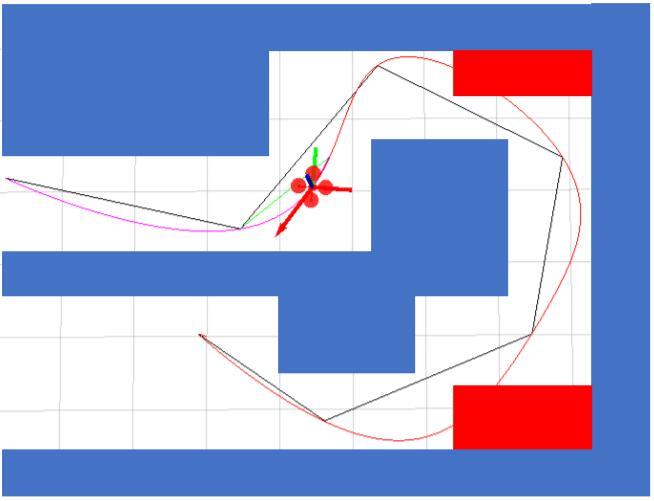
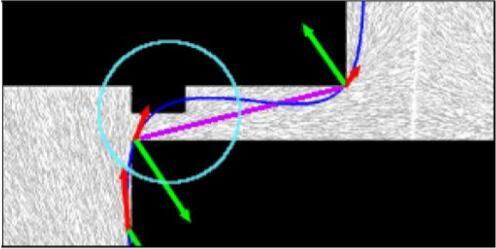
对于配备稀疏点云传感器(如红外、超声波、激光雷达、毫米波雷达 等)或组合传感器(如红外组合双目视觉 等)的无人机而言,我们能够设计出一套相对较为完备的局部避障规划方案,以此达到无人机避障的目的。 以上文提到的MinimumSnap 算法为例: 当轨迹优化生成的轨迹经过障碍物时,我们可以采取在该段轨迹前后Waypoint 之间的中间位置插入一个新的Waypoint ,然后对其重新进行轨迹优化。那么,最坏的情况下,轨迹优化的结果会出现趋近于前端路径搜索得到的轨迹,尽管,该轨迹在动力学上并不是最优的,但这条轨迹一定是collision-free 的(如图3所示),这能够满足基本的作业安全要求。
通常来说,我们可以采用以下算法进行局部避障规划器设计:
- MinimumSnap/MinimumJerk
该算法是在对无人机动力学模型进行建模的基础上,将轨迹进行参数化,简化为多项式形式,进而,通过设计优化函数,同时,根据Waypoint 的状态信息进行约束条件设计,如微分约束、连续性约束等等。在一系列约束条件下进行凸优化问题的求解,从而得到最优轨迹。
- 模型预测控制(MPC)
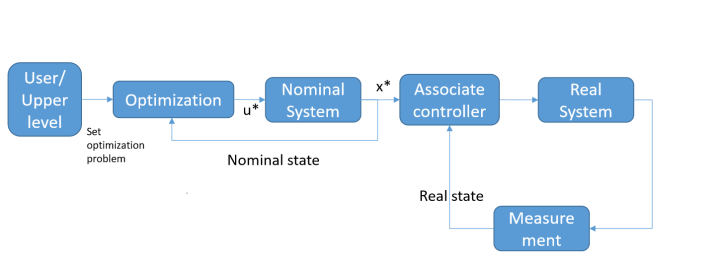
模型预测控制是一种基于对象模型的控制算法,在运动规划领域,我们往往采用Tube-Based MPC 的框架进行运动规划方案设计(如下图所示)。模型预测控制常被用于求解轨迹优化问题的最优解,其本质与 MinimumSnap 类似。我们需要建立对应的Cost-Function 、无人机系统的问题模型 以及系统模型 ,然后通过求解凸优化问题求得最优轨迹,具体的实现方式可参考我的相关文章。
- JerkLimitedTrajectory(JLT)
- VFF
VFF 又称虚拟力场法,该算法将障碍物与目标点之间虚构出斥力与引力,通过搜索势函数的下降方向来寻找无碰撞路径,它是人工势场法与栅格法结合的一种机器人实时避障算法。
- VFH
- DWA
DWA 又称动态窗口法,其原理主要是在速度空间![[公式]](https://www.zhihu.com/equation?tex=%EF%BC%88v%2Cw%EF%BC%89) 中采样多组速度,并模拟这些速度在一定时间内的运动轨迹,再通过一个评价函数对这些轨迹打分,最优的速度被选择出来发送给无人机执行。
中采样多组速度,并模拟这些速度在一定时间内的运动轨迹,再通过一个评价函数对这些轨迹打分,最优的速度被选择出来发送给无人机执行。
总结
本文针对基于稀疏点云传感器的无人机避障问题进行了阐述,同时简介了几种主流的局部避障规划器,针对配备不同传感器的无人机系统,我们总能够在其中找到一种适用的方案。 下一篇将着重针对配备单点测距传感器的无人机避障方案实现进行展开讨论,并给出可行的轨迹求解器。作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。
知乎: @遥远的乌托邦 GitHub: https://github.com/DistantUtopia 微信公众号: @遥远的乌托邦



评论(0)
您还未登录,请登录后发表或查看评论